MotoTron快速原型平台:从安装到工程建立指南
需积分: 28 157 浏览量
更新于2024-07-14
2
收藏 3.16MB PDF 举报
"MotoTron快速原型平台使用手册_V1.9.pdf"
MotoTron快速原型开发平台是一款专用于车辆电子控制系统开发的软件工具,由意昂神州(北京)科技有限公司提供。该手册详细介绍了如何使用MotoTron软件以及建立MotoHawk工程的步骤,适用于进行快速原型设计和测试。
1. 软件安装
在开始使用MotoTron之前,需要确保上位机操作系统是32位或64位的Windows XP、Win7、Win8或Win10。安装软件时,需要一个支持的环境,包括MATLAB、Simulink以及与之兼容的组件:
- MATLAB:基础计算环境
- Simulink:图形化建模工具
- Simulink Real-Time Workshop:实时仿真工作台
- Realtime Workshop Embedded Coder:嵌入式代码生成器
- Stateflow:状态机设计和仿真工具
- Stateflow Coder:将Stateflow模型转换为C代码
安装顺序按照提供的列表,先安装GreenHills Software,然后按照提示依次进行。
2. MotoHawk工程建立
创建MotoHawk工程有两种方法:
- 方法一:通过输入命令`motohawk_project('name')`来创建新工程,其中`name`是自定义的工程名称。
- 方法二:使用Simulink中的“新建Model”功能创建模型,然后逐步配置工程。
3. 底层模块选择和配置
MotoTron平台提供了多种底层模块供用户选择和配置,如模拟量输入、数字量输入、频率信号输入、PWM输出等,以满足不同控制需求。
4. 硬件I/O及通讯模块选择和配置
- AnalogInput:用于接收模拟信号输入,例如传感器数据。
- DigitalInput:处理数字信号输入,例如开关状态。
- FrequencyInput:用于检测周期性信号,如转速信号。
- PWM输出模块:生成脉宽调制信号,常用于驱动电机或控制其他设备。
- EncoderDefinition:配置发动机或其他旋转设备的信息。
- MotohawkReadCANMessage:读取CAN总线上的报文,用于通信和数据交换。
- MotohawkReadSendMessage:发送CAN报文,实现与其他设备的通信。
- MotohawkCalibration:数据标定模块,用于调整和校准系统参数。
- MotohawkProbe:数据监测模块,实时查看和分析系统运行数据。
5. 用户算法开发
用户可以在MotoTron环境中使用Simulink构建自己的控制算法模型。
6. 程序编译
完成算法设计后,可以进行预编译和程序编译。预编译有助于检查模型的正确性,而正式编译会生成可执行代码。
7. MotoServer配置&程序下载
MotoServer是用于配置和下载程序到目标控制器的工具,包括设置通信参数和实际的程序下载操作。
8. 监控及标定
- 监控:通过MotoTron平台实时监控系统运行状态,包括变量值、错误信息等。
- 标定:在运行过程中对系统参数进行在线调整,优化系统性能。
9. 控制器特性及管脚资源说明
- 技术特性:详细列出了控制器的技术规格,如处理能力、内存大小等。
- 接口资源:说明了控制器的物理接口,如GPIO、CAN、模拟输入/输出等。
- 管脚资源说明:解释了每个管脚的功能和使用方法,指导用户正确连接硬件。
通过这个手册,用户可以全面了解MotoTron快速原型平台的使用方法,从软件安装、工程创建到算法开发、硬件配置、程序下载和监控标定,为车辆电子控制系统的开发提供了一套完整的流程。

3
点击 Motohawk,可以看到以下集成的模型库,如下图;
2 MotoHawk 工程建立
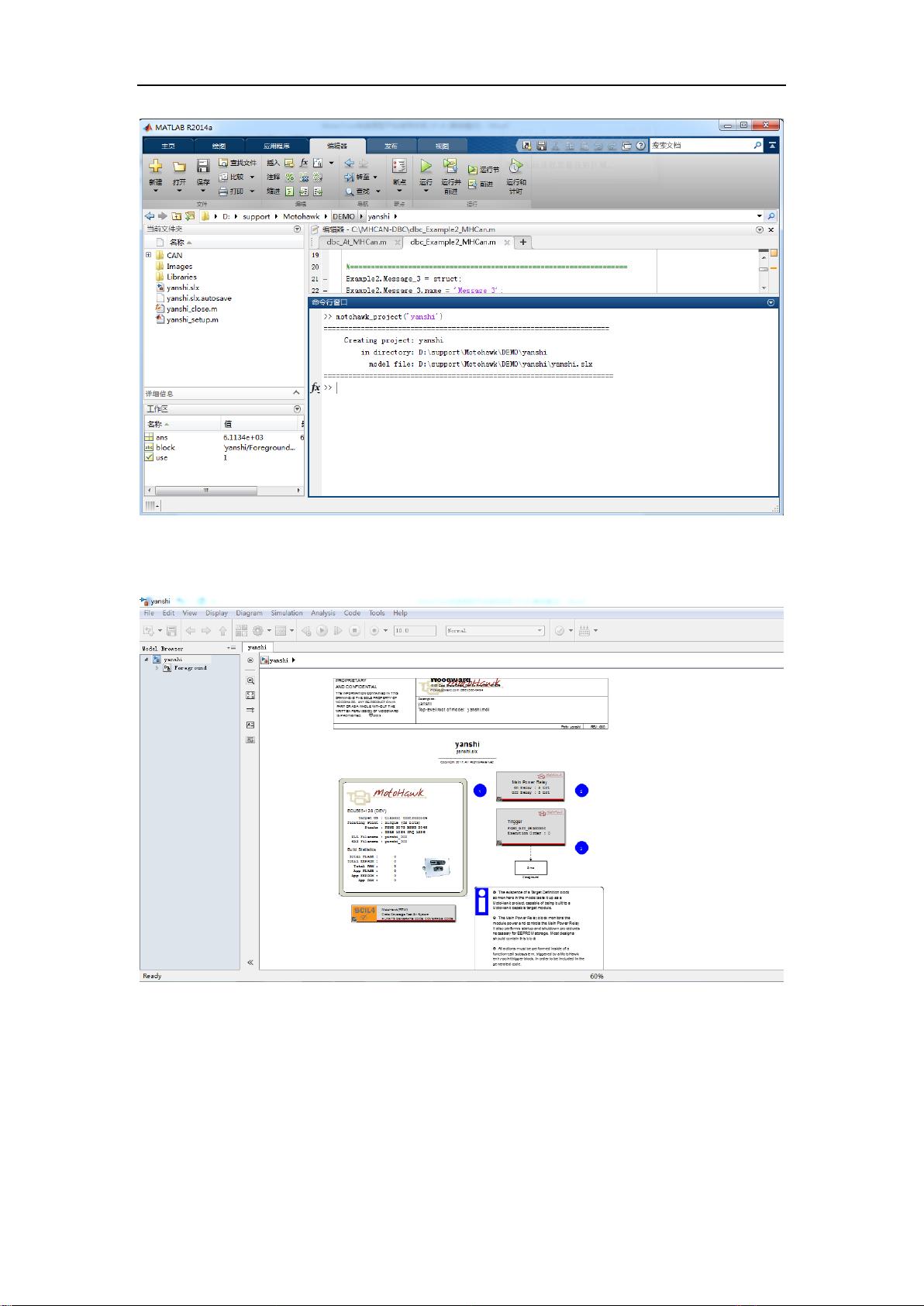
2.1 方法一:输入命令 motohawk_project(‘name’)
打开 Matlab,在命令窗口输入命令 motohawk_project(‘name’),工程名根据
需要自己定义,然后回车,自动生成一个已命名的.slx 文件,如图:
剩余31页未读,继续阅读
点击了解资源详情
151 浏览量
点击了解资源详情
169 浏览量
2021-05-30 上传
378 浏览量
151 浏览量
点击了解资源详情
点击了解资源详情

挪威的深林
- 粉丝: 226
 我的内容管理
展开
我的内容管理
展开







最新资源
- 通用项目管理流程详解:责任矩阵与关键阶段
- 图基与逻辑基多关系数据挖掘对比分析
- 精通Python 2.1:权威指南
- Oracle PL/SQL学习教程:查询、运算与NULL处理
- Linux共享库详解:编写与优化技巧
- idl编程:交互数据处理与可视化利器
- 理解设计模式:简单工厂、工厂方法与抽象工厂
- ArcIMS入门指南:实现交互式GIS应用
- VC调试技巧详解:从入门到精通
- 构建全面的在线购物网站:从需求到实施
- C++实现的学生成绩管理系统与分治算法论文
- 湛江广播电视大学电子商务毕业设计:书籍专卖店网站
- VIM中文手册:Linux编辑器实战指南
- ATMEGA 48-88-168:高性能8位微处理器中文手册详解
- 网络工程师必备:X.25、ATM与OSI模型解析
- 赣冠教育自考学籍管理系统需求详解与设计要点
