ROS开发教程:使用QT插件控制机器人
19 浏览量
更新于2024-08-28
收藏 739KB PDF 举报
“ROS开发:QT插件操控小乌龟”
本文将介绍如何在ROS(Robot Operating System)环境中使用QT插件来操控小乌龟模拟器,这主要涉及两个部分:QT-ROS插件的安装和使用QT编写ROS程序。
1. 安装QT-ROS插件
在Ubuntu 16.04系统中,安装QT-ROS插件的步骤如下:
- 首先,通过命令行添加PPA源:
```
sudo add-apt-repository ppa:levi-armstrong/qt-libraries-xenial
sudo add-apt-repository ppa:levi-armstrong/ppa
```
- 接着,更新软件列表并安装插件:
```
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros
```
- 如果之前有其他版本的QT PPA,需要移除:
```
sudo add-apt-repository --remove ppa:beineri/opt-qt57-xenial
sudo add-apt-repository --remove ppa:beineri/opt-qt571-xenial
```
- 删除相关列表文件:
```
sudo rm /etc/apt/sources.list.d/beineri-opt-qt57-xenial-xenial.list
sudo rm /etc/apt/sources.list.d/beineri-opt-qt571-xenial-xenial.list
```
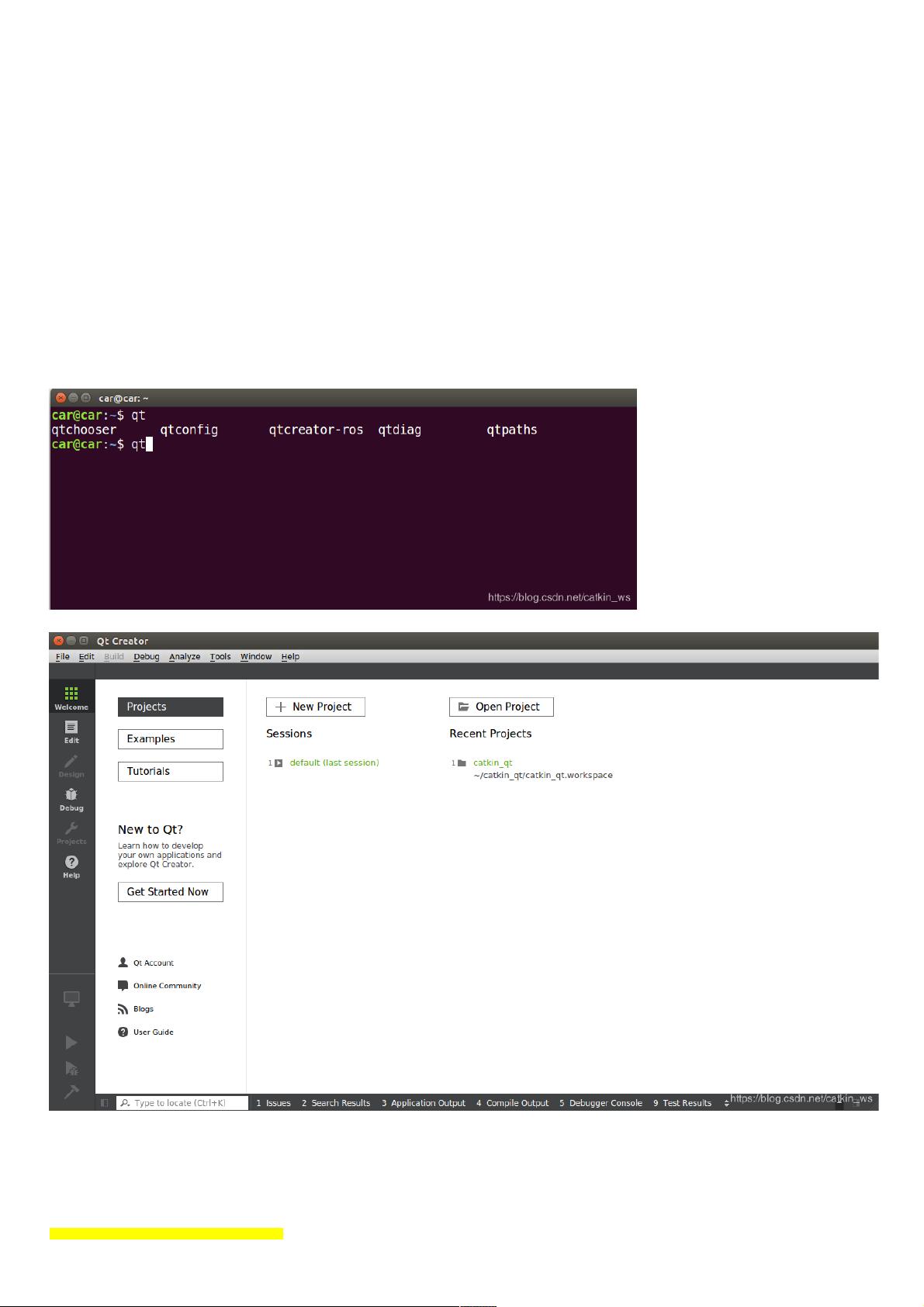
- 安装完成后,通过输入`qt`并按Tab键检查安装,确认QTcreator-ros已经启动。
2. 使用QT编写ROS程序
2.1 实现步骤
- 创建ROS工作空间和src目录:
```
mkdir -p catkin_qt/src
```
- 进入工作空间并初始化:
```
cd catkin_qt
catkin_init_workspace
```
- 源码编译工作空间:
```
cd src
catkin_create_pkg my_ros_qt_project rospy roscpp qt5x_qtwidgets
cd ..
catkin_make
source devel/setup.bash
```
- 打开QT Creator,选择File > New File or Project,然后在模板中找到ROS相关选项,创建一个新的QT项目。
2.2 测试QT程序
- 在创建的QT项目中,编写控制小乌龟的代码,通常会包括订阅或发布ROS话题来与小乌龟进行交互。
- 编译并运行QT项目,确保与ROS环境正确连接,可以正确操控小乌龟。
3. 参考资料
- 可以参考以下链接获取更多帮助:
- [CSDN文章1](http://blog.csdn.net/zhangrelay/article/details/52068657)
- [CSDN文章2](http://blog.csdn.net/u013453604/article/details/52186375)
- [CSDN文章3](http://blog.csdn.net/qq_30460905/article/details/79034633)
通过这个过程,开发者能够利用QT的图形界面设计能力,结合ROS的强大功能,实现对小乌龟或其他机器人模型的直观控制。QT Creator的ROS插件使得在QT环境下编写ROS程序变得更加便捷,同时也简化了界面与ROS节点之间的通信。
ROS开发:开发:QT插件操控小乌龟插件操控小乌龟
ROS开发:开发:QT插件操控小乌龟插件操控小乌龟1 安装QT-ROS插件1.1 Ubuntu16.04 安装步骤1.2 测试插件2 使用QT编写ROS程序2.1 实现步骤2.2 测试QT程序3 参考资料
1 安装安装QT-ROS插件插件
本插件在安装过程中自行安装QT,无需额外安装。
1.1 Ubuntu16.04 安装步骤安装步骤
打开Terminal,输入:
sudo add-apt-repository ppa:levi-armstrong/qt-libraries-xenial
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros
可能需要删除旧的PPA:
sudo add-apt-repository --remove ppa:beineri/opt-qt57-xenial
sudo add-apt-repository --remove ppa:beineri/opt-qt571-xenial
如果您收到错误,请手动删除它:
sudo rm /etc/apt/sources.list.d/beineri-opt-qt57-xenial-xenial.list
sudo rm /etc/apt/sources.list.d/beineri-opt-qt571-xenial-xenial.list
1.2 测试插件测试插件
由于插件的更新,不需要安装qtcreator,插件自己依赖安装。
安装完成后在指令行输入qt,按Tab键看自己安装的。如图:
然后输入存在的qtcreatot-ros回车,qtcreator就启动了,就会看到有关于ros的创建选项了。如图:
安装有问题可以借鉴:
http://blog.csdn.net/zhangrelay/article/details/52068657
http://blog.csdn.net/u013453604/article/details/52186375
http://blog.csdn.net/qq_30460905/article/details/79034633
2 使用使用QT编写编写ROS程序程序
2.1 实现步骤实现步骤
Terminal新建工作空间catkin_qt,并创建src文件夹
mkdir -p catkin_qt/src
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-01 上传
2021-05-04 上传
2021-05-02 上传
点击了解资源详情

weixin_38629976
- 粉丝: 7
- 资源: 971
 我的内容管理
展开
我的内容管理
展开







最新资源
- 作业1:cst438_assign1
- z.js:via通过Unicode的ZW(N)Js隐藏文本
- 基于Linux、QT、C++的点餐系统
- zerg:小程序教程源码-源码程序
- glogIntroduce,c语言会员积分管理系统源码,c语言程序
- 最新时时地震信息程序 V1.0
- studienarbeit2021:Niclas Mummert,斯图加特DHBW和Bertrandt Technologie GmbH的研究
- 全功能11-26A.zip
- 将Excel文件动态导入到SQL Server
- 信用卡养卡app开发HTML5模板
- Android应用源码之项目实例 商业项目源代码.zip项目安卓应用源码下载
- wx-computed2:几乎照搬vue原始码为小程序增加计算和观看特性-源码程序
- matlab 图片中隐藏信息以及提取的程序代码.zip
- level-0-module-1-alysiaroh:GitHub Classroom创建的level-0-module-1-alysiaroh
- easy_roles:轻松管理Rails的角色
- queue,c语言制作图书管理软件源码,c语言程序
