PWM-电动机系统动态性能优势分析
需积分: 50 87 浏览量
更新于2024-07-25
收藏 404KB PDF 举报
"运动控制课后习题,包含陈博识第三版教材的解答,涉及直流调速系统、PWM技术和制动过程的分析,以及调速范围和静差率的定义和关系。"
在运动控制领域,闭环控制的直流调速系统是重要的研究对象。PWM—电动机系统相较于传统的晶闸管—电动机系统,具有多方面的优势。首先,PWM系统的主电路设计更为简洁,所需的功率器件数量较少。其次,由于其较高的开关频率,使得电流波形更接近于理想直流,因此电机的损耗和发热都相对较小。此外,PWM系统在低速运行时表现出良好的性能,具备高稳速精度和宽调速范围,可达1:10000左右。如果配合响应速度快的电动机,系统可以实现更宽的频带,动态响应更快,对扰动的抑制能力更强。再者,功率开关器件在PWM系统中主要处于开关状态,降低了导通损耗,适当选择开关频率还能有效控制开关损耗,提高装置效率。最后,当直流电源采用不控整流时,电网功率因数相比相控整流器更高。
关于有制动通路的不可逆PWM变换器,其制动过程涉及到两个VT(电压晶体管)的工作状态。在制动状态下,当需要减速时,通过调整控制电压使得电流反向,VT1导通,电流沿回路3流动,产生能耗制动;VT2则在特定时间后关断,电流通过VT1续流,同时两端电压被钳位,防止VT1再次导通。在轻载电动状态,平均电流小,VT1关断后电流迅速衰减至零,VT2会提前导通,产生短暂制动效果。
调速范围(D)是指电动机在额定负载下最高转速与最低转速的比值,用于衡量系统的速度调节能力。静差率(s)则是指系统在某一恒定负载下,当转速变化时,实际转速与理想无静差转速之间的差值与理想无静差转速的比率。调速范围、静差率和静差速降之间存在关联,因为在一个大的调速范围内,保持较低的静差率变得更具挑战性。当脱离了特定的调速范围,静差率的满足条件可能会变得相对容易,但这并不意味着系统性能得到提升,反而可能牺牲了速度控制的精确性。因此,设计时需要综合考虑调速范围和静差率,以确保系统在实际应用中的性能表现。
K
p
K
s
α
1
/C
e
U
*
n
U
c
∆U
n
E
n
U
d0
U
n
+
+
-
I
d
R
-
U
n
K
s
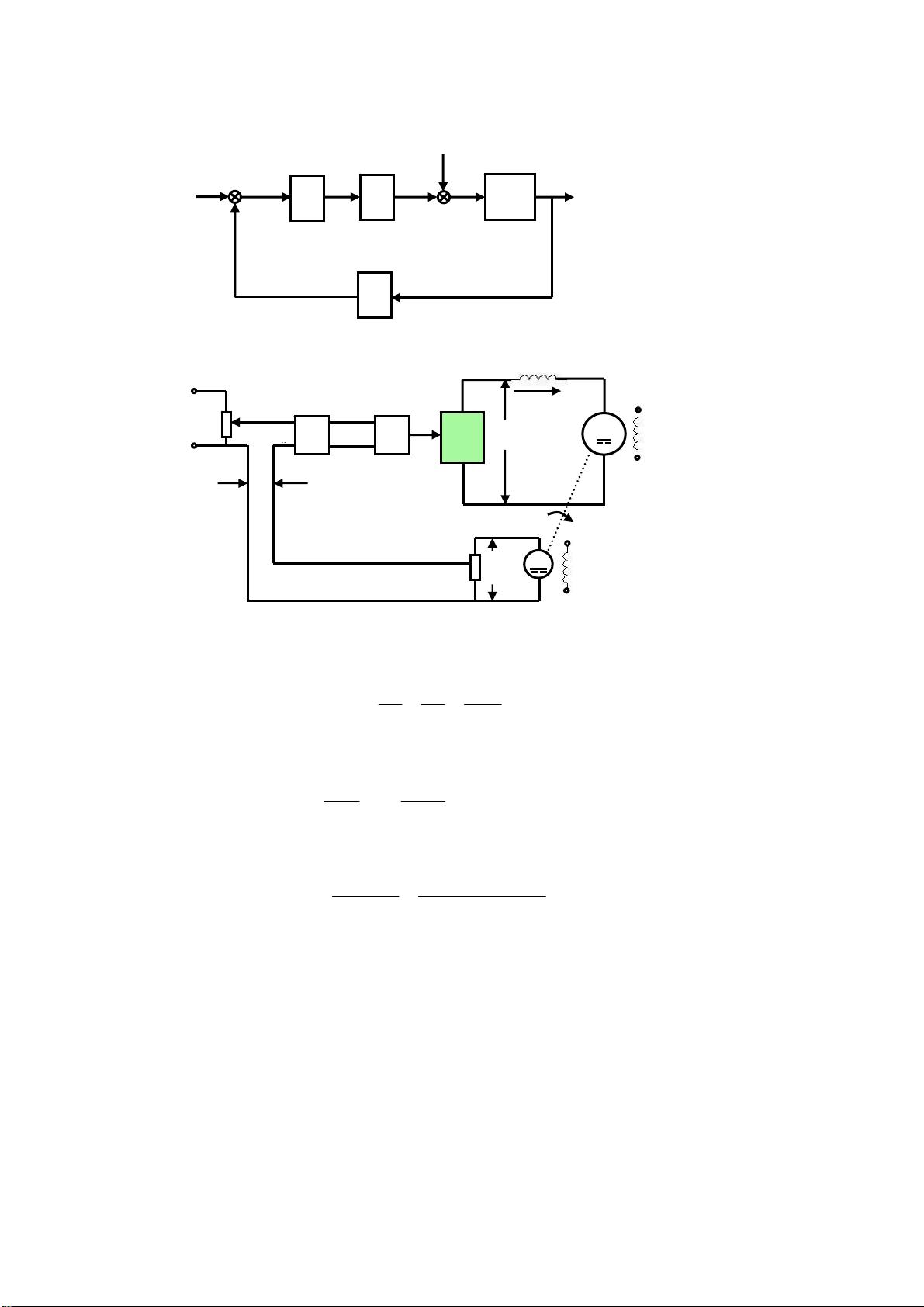
转速负反馈系统的原理图
+
-
A GT
M
TG
+
-
+
-
+
-
U
tg
U
d
I
d
n
+
-
-
+
U
n
∆U
n
U
*
n
U
c
UPE
+
-
M
T
I
d
U
n
U
d
U
c
U
n
tg
( 3 ) 当 时,
15
n
U
∗
= V
dN
II
=
N
,n=n ,则转速负反馈系数
α
应该是
15
0.01
1500
nn
N
UU
nn
α
∗∗
=== =
(4)闭环系统的开环放大系数应为
246.9
1 1 28.64
8.33
op
cl
n
K
n
Δ
=−= −=
Δ
运算放大器所需的放大倍数
28.64
11.19
/ 0.01 35 / 0.1367
P
Se
K
K
KC
α
== =
×
1—11 在题 1-10 的转速负反馈系统中增设电流截止环节,要求堵转电流
2
dbl N
I
I≤ ,临界
截止电流
1.2
dcr N
I
I≥ ,应该选用多大的比较电压和电流反馈采样电阻?要求电流反馈采样
电阻不超过主电路总电阻的 1/3,如果做不到,需要增加电流反馈放大器,试画出系统的原
理图和静态结构框图,并计算电流反馈放大系数。这时电流反馈采样电阻和比较电压各为多
少?
剩余24页未读,继续阅读
1470 浏览量
1857 浏览量
239 浏览量
127 浏览量
1392 浏览量
2010-12-15 上传

hzd727
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
