自平衡小车:加速度与陀螺仪的互补滤波技术
"这篇文档是关于自平衡小车的,主要讨论了如何通过集成加速度计MMA8451和陀螺仪的数据,利用卡尔曼滤波或互补滤波来实现平衡平台的稳定控制。文章作者Shane Colton提到了在2007年提交的Chief Delphi whitepaper中的解决方案。"
自平衡小车是一种基于动态平衡原理运行的交通工具,如常见的电动独轮车或双轮自平衡滑板车。为了实现这种平衡,关键在于精确地感知和处理车辆的姿态信息,即角度和角速度。文档中提到了两种重要的传感器:加速度计和陀螺仪。
加速度计MMA8451可以测量物体在三个轴向上的加速度,包括重力加速度。在静止状态下,它能提供车辆相对于地球引力的方向信息,用于确定车辆的倾斜角度。例如,当小车竖直时,X轴读数为0g,Y轴读数为-1g(表示向下,即重力方向)。然而,由于Y轴对小角度倾斜的敏感度较低且不依赖于倾斜方向,因此在实际应用中,X轴数据通常比Y轴更有用。
陀螺仪则能够检测旋转速率,即角速度。在没有旋转时,陀螺仪读数为零;当小车旋转时,它会读出正或负值,指示旋转的方向。这两个传感器的数据结合,可以提供更准确的动态姿态信息。
读取传感器数据时,需要进行校准,包括偏置(offset)和尺度(scale)的调整。偏置是通过测量静态状态下的传感器输出来确定的,而尺度调整则是为了将原始模拟信号转换为具有物理意义的单位。
接下来,文档可能探讨如何将这些传感器数据融合。在平衡控制中,卡尔曼滤波是一种常用的高级数据融合方法,它可以有效地结合加速度计和陀螺仪的噪声特性,提供最优的估计。但卡尔曼滤波的计算复杂度较高,对于实时性要求较高的应用场景,可能会选择互补滤波。互补滤波是一种简化版的数据融合策略,它结合了加速度计和陀螺仪的优点,既能捕捉短期动态变化,又能保持长期稳定性。
通过这样的数据融合算法,自平衡小车可以实时监测和纠正自身的姿态,从而实现稳定的行驶和平衡。这种技术在现代智能移动设备和机器人领域有广泛的应用。
A bit more about the accelerometer…
If it was necessary to have an estimate of angle for 360º of rotation, having the Y-axis
measurement would be useful, but not necessary. With it, we could use trigonometry to find the
inverse tangent of the two axis readings and calculate the angle. Without it, we can still use sine
or cosine and the X-axis alone to figure out angle, since we know the magnitude of gravity. But
trig kills processor time and is non-linear, so if it can be avoided, it should.
For a balancing platform, the most important angles to measure are near vertical. If the platform
tilts more than 30º in either direction, there’s probably not much the controller can do other than
drive full speed to try to catch it. Within this window, we can use
small angle approximation
and the X-axis to save processor time and coding complexity:
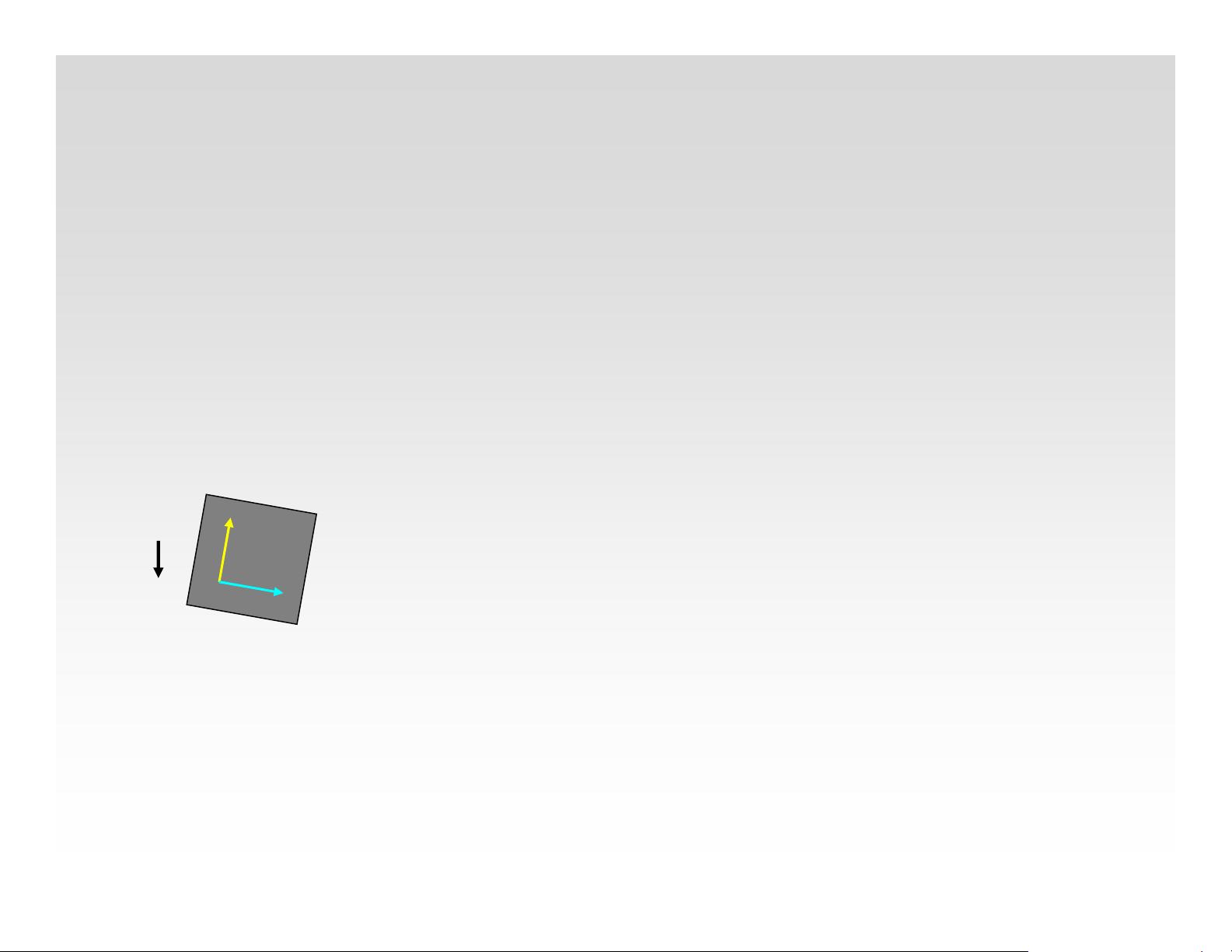
Y
X
g
Platform is tilted forward by and angle θ, but stationary (not accelerating
horizontally).
X-axis reads: (1g) × sin(
θ)
small angle approximation: sin(θ) ≈ θ, in radians
This works well (within 5%) up to θ = ±π/6 = ±30º.
So in the following bit of code,
x_acc = (float)(x_acc_ADC – x_acc_offset) * x_acc_scale;
x_acc will be the angle in radians if x_acc_scale is set to scale the output
to 1[g] when the X-axis is pointed straight downward.
To get the angle in
degrees, x_acc_scale should be multiplied by 180/π.
剩余19页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2014-01-02 上传
2019-08-25 上传
2021-09-30 上传
2019-09-05 上传
2021-01-06 上传
2011-12-11 上传

lwzhdu
- 粉丝: 1
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
