APM调试指南:参数设置与自动降落教程
需积分: 9 173 浏览量
更新于2024-09-09
1
收藏 967KB DOCX 举报
APM调试帮助文档是一份详尽的指南,旨在为用户理解并操作ArduCopter的自动飞行模式(Autopilot Mode, APM)提供深入的指导。该文档特别关注参数调节,确保用户能够充分利用无人机的潜力,进行精确的飞行控制。
文档首先指出,当执行"Land"命令时,APM不会像飞机那样先飞向一个指定地点再降落,而是直接从当前位置降落。因此,如果想要在特定航点着陆,需先手动飞到常规航点,然后下一条指令才会执行降落。在Mission Planner中,绝对高度设置(Absolute Altitude)被忽略,因为ArduCopter仅使用相对于起飞高度的默认相对高度。
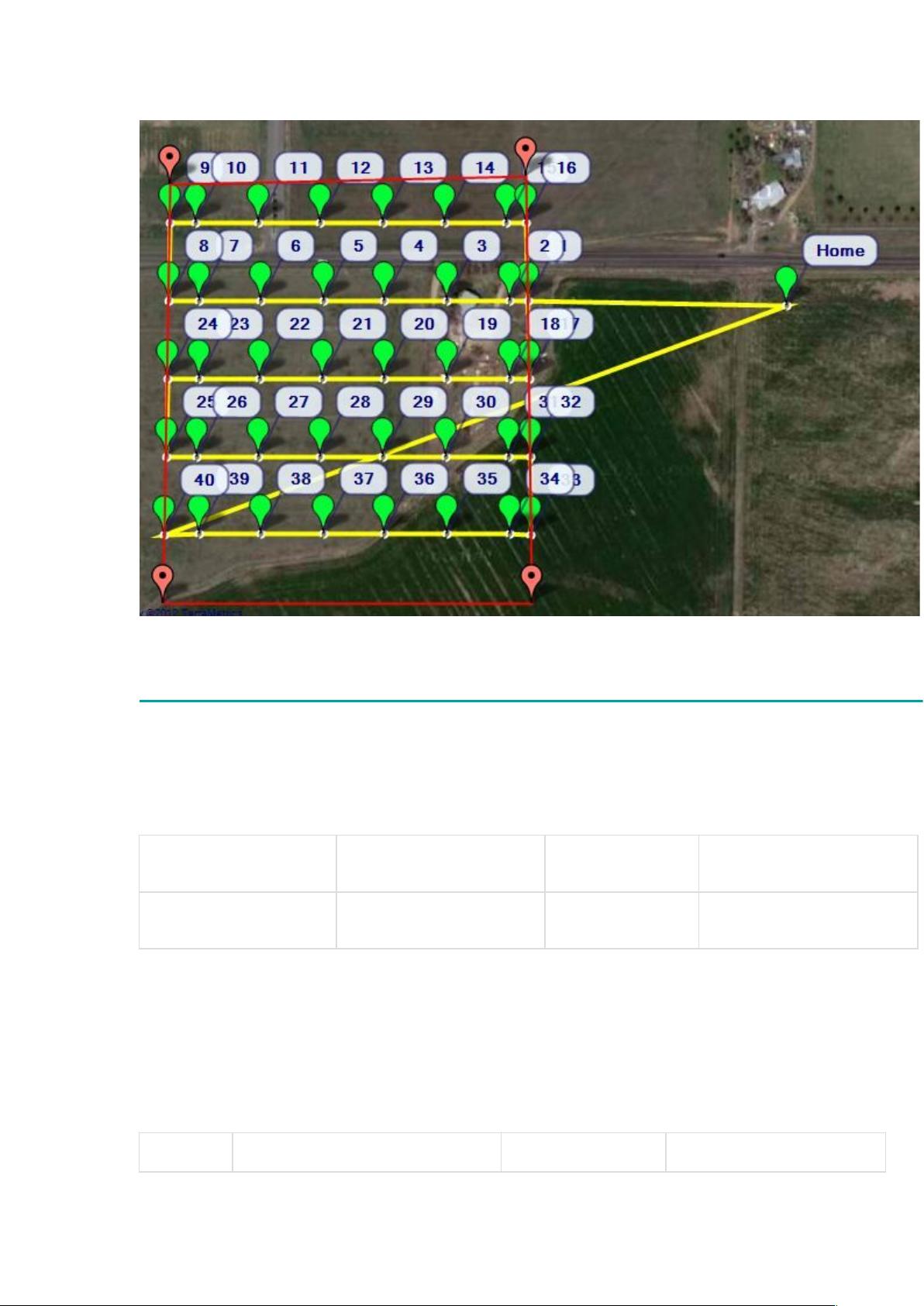
接下来,文档演示了如何规划任务,例如从20米的自动起飞开始,通过三个航点(每个100米高),最后设置一个着陆模式。在地图上,可以添加航点和输入指令,包括纬度、经度和高度。高度是相对于起飞高度的,例如设定100米,意味着无人机将在起飞位置上方100米的高度飞行。
默认高度在添加新航点时起作用,也是返回发射点( RTL, Return To Launch)模式中的飞行高度。如果勾选"保持默认高度",则在RTL模式下无人机将按预设的默认高度飞行;如果不选择,飞行高度会根据实时条件调整。
此外,文档还列出了完整的命令列表和数据要求,以便用户根据需要进行操作。这份文档对于学习如何调整和优化APM设置,以及确保飞行安全和高效至关重要,无论是初级还是高级用户都能从中获益匪浅。通过遵循文档中的指示,用户可以充分利用ArduCopter的自动飞行功能,实现精准的飞行控制和任务执行。
Basic waypoint commands
>
WAYPOINT
<
4./ ./ $
%!?@-<#
4$$#
4 )
<A!B%"
") )" *1%
剩余11页未读,继续阅读
2021-10-01 上传
107 浏览量
2023-08-06 上传
2023-07-01 上传
2023-06-10 上传
2023-04-04 上传
2023-06-09 上传
2023-09-15 上传
2023-06-10 上传

guoqisunsina
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
