ATmega16电液伺服阀反馈控制器设计与PID应用
PDF格式 | 319KB |
更新于2024-09-01
| 186 浏览量 | 举报
"电子测量中的基于ATmega16的电液伺服阀反馈控制器设计方案,主要关注如何通过ATmega16微控制器改善电液伺服阀在实际应用中的输出稳定性问题,采用了数字PID控制算法来实现压力的精确调节。"
在电子测量领域,基于ATmega16的电液伺服阀反馈控制器设计方案旨在解决电液伺服阀在实际应用中常见的输出压力不稳、偏高或偏低的挑战。ATmega16是一款高性能、低功耗的微控制器,其RISC结构使得它能快速处理控制任务并提供可靠的运行环境。
在该设计中,控制器通过采集伺服阀的输出压力作为反馈信号,构建了一个闭环控制系统。这一过程的关键在于使用了经典的增量式数字PID(比例-积分-微分)控制算法。PID控制是一种广泛应用的反馈控制方法,能够实时调整控制量,以减小系统误差,确保系统响应快速且输出稳定。在电液伺服阀的场景下,PID算法可以有效调节伺服阀的控制电流,进而精确控制输出压力,提高系统的控制精度和动态响应速度。
电液伺服阀广泛应用于各种工程系统,尽管存在维护复杂、易泄漏和噪声大的问题,但因其在大功率控制中的优势,其重要性不可替代。随着技术的发展,对电液伺服阀的性能要求日益提升,包括更高的控制精度、更快的动态响应以及更低的成本。
在系统设计中,ATmega16单片机不仅承担核心控制任务,还通过集成输入信号采集电路、电流信号输出电路和故障切换电路,实现了功能的高效整合。输入信号采集电路负责将伺服阀的控制电流(4~40mA,对应0~20MPa的压力)转换为可被ATmega16的10位ADC(模数转换器)处理的电压信号(0~5V)。这种设计简化了系统架构,降低了开发成本,同时也提高了系统的集成度。
基于ATmega16的电液伺服阀反馈控制器方案通过数字化的控制策略和优化的硬件设计,提升了电液伺服阀的性能,满足了高精度、高速响应的需求,为电液伺服系统的稳定运行提供了有力保障。
电子测量中的基于电子测量中的基于ATmega16 的电液伺服阀反馈控制器设计方的电液伺服阀反馈控制器设计方
案案
导读: ATmega16平台的数字式液压伺服阀反馈控制器,是针对电液伺服阀在实际工程应用中出现输出压力不
稳定、输出压力偏高或偏低的问题而设计的。该控制器采集伺服阀输出压力作为反馈信号构成闭环控制系统,
采用经典的增量式数字PID控制算法进行压力调节。实际应用结果表明该数字式电液伺服阀反馈控制系统响应快
速、输出稳定、输出压力精度高。 0 引言 电液伺服阀在工程系统中有着广泛的应用。尽管液压系统具
有维护困难、泄漏、噪声比大等缺点,但是对于大功率的自动控制系统,液压控制是其他控制形式所不能替代
的。 随着电液伺服系统应用领域的拓展,对电液伺服阀提出了更高的要求,如控制精度高、动态响应快
导读:导读: ATmega16平台的数字式液压伺服阀反馈控制器,是针对电液伺服阀在实际工程应用中出现输出压力不稳定、输平台的数字式液压伺服阀反馈控制器,是针对电液伺服阀在实际工程应用中出现输出压力不稳定、输
出压力偏高或偏低的问题而设计的。该控制器采集伺服阀输出压力作为反馈信号构成闭环控制系统,采用经典的增量式数字出压力偏高或偏低的问题而设计的。该控制器采集伺服阀输出压力作为反馈信号构成闭环控制系统,采用经典的增量式数字
PID控制算法进行压力调节。实际应用结果表明该数字式电液伺服阀反馈控制系统响应快速、输出稳定、输出压力精度高。控制算法进行压力调节。实际应用结果表明该数字式电液伺服阀反馈控制系统响应快速、输出稳定、输出压力精度高。
0 引言
电液伺服阀在工程系统中有着广泛的应用。尽管液压系统具有维护困难、泄漏、噪声比大等缺点,但是对于大功率的自动
控制系统,液压控制是其他控制形式所不能替代的。
随着电液伺服系统应用领域的拓展,对电液伺服阀提出了更高的要求,如控制精度高、动态响应快、成本低等。但由于外
部环境的干扰或电液伺服阀本身的性能不足,会出现伺服阀输出压力抖动过大、输出压力偏高或偏低的问题。故设计此电液伺
服阀反馈控制器,可实现电液伺服阀稳定精确地输出压力。
1 总体设计
电液伺服阀反馈控制器核心控制芯片采用AT-mega16 单片机,ATmega16采用先进的RISC 结构,代码执行速度高,工作
可靠稳定。
外围电路的设计主要包括输入信号采集电路、电流信号输出电路以及故障切换电路三部分。
考虑工程实际应用需求及系统集成化要求,将两路控制电路集成使用一片ATmega16单片机实现控制。充分利用了单片机
的资源,同时节约开发成本。
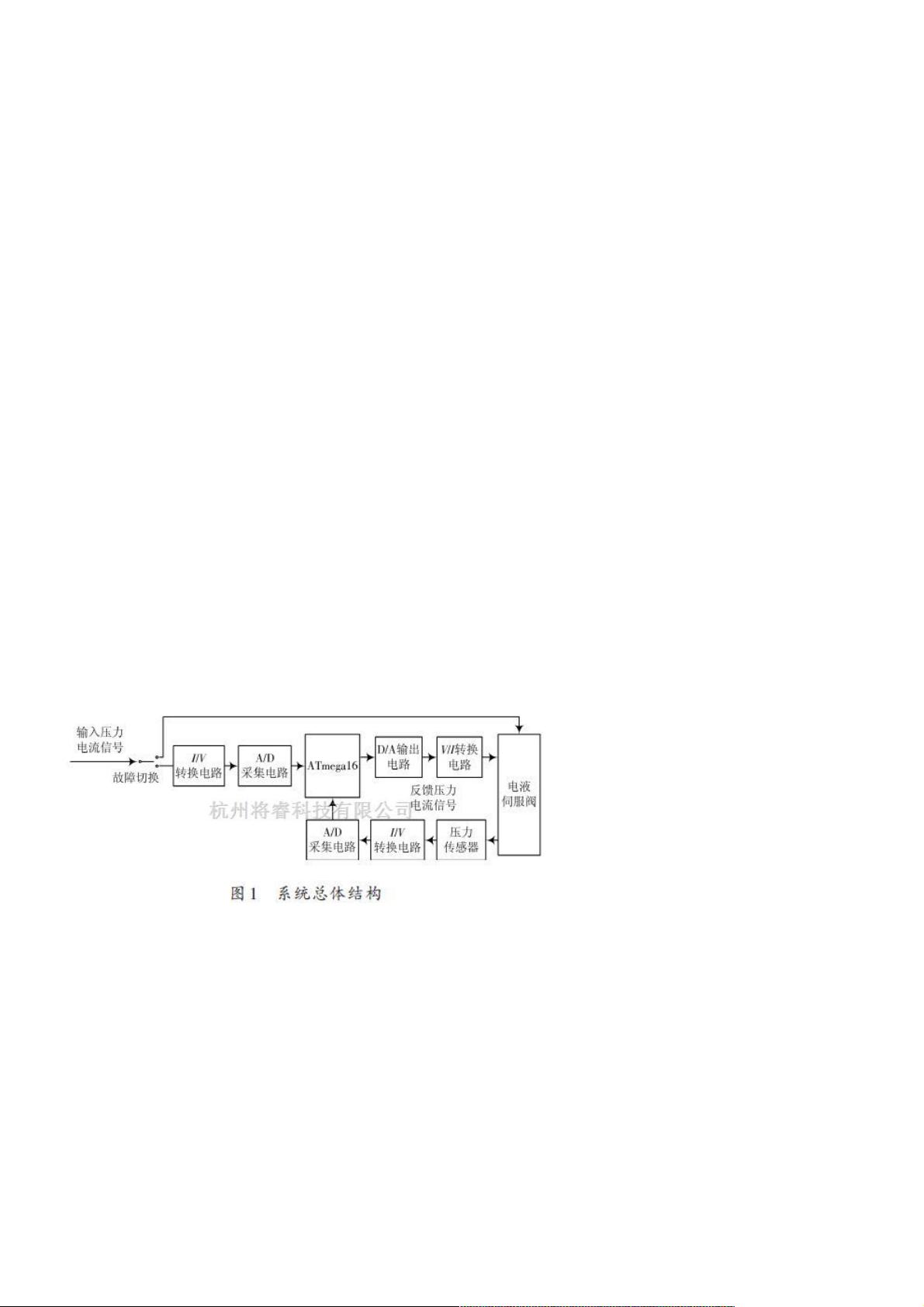
系统总体结构如图1所示
2 输入信号采集电路
电液伺服阀依靠电流信号进行控制,控制电流范围为4~40 mA,对应输出压力为0~20 MPa.ATmega16有8路10位的ADC,
采集电压的范围为0~5 V.因此需要将控制电流信号进行调理供单片机A/D口进行采集。
输入信号采集电路主要由I V 转换电路和A/D 采集电路组成,实现将4~40 mA电流转换为可供单片机采集的0~5 V电压。电
路如图2所示
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐


weixin_38629042
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB实现Excel数据导入到ListView控件技术
- 触屏版wap购物网站模板及多技术源码大全
- ZOJ1027求串相似度解题策略与代码分析
- Excel表格数据合并工具:高效整合多个数据源
- MFC列表控件:实现下拉选择与编辑功能
- Tinymce4集成Powerpaste插件即用版使用教程
- 探索QMLVncViewer:Qt Quick打造的VNC查看器
- Mybatis生成器:快速自定义实体类与Mapper文件
- Dota 2插件开发:TrollsAndElves自定义魔兽3地图攻略
- C语言编写单片机控制蜂鸣器唱歌教程
- Ansible自动化脚本简化Ubuntu本地配置流程
- 探索ListView扩展:BlurStickyHeaderListView源码解析
- 探索traces.vim插件:Vim的范围选择与模式高亮预览
- 快速掌握Ruby编译与安装的神器:ruby-build
- C语言实现P1口灯花样控制源代码及使用指南
- 会员管理系统:消费激励方案及其源代码
