特斯拉自动驾驶系统安全研究:远程操控与攻击漏洞剖析
需积分: 10 153 浏览量
更新于2024-07-15
1
收藏 3.03MB PDF 举报
本研究论文《Experimental Security Research of Tesla Autopilot》由腾讯科恩安全实验室(Keen Security Lab)进行,针对特斯拉车辆的自动驾驶系统(Autopilot)进行深入的安全研究,并连续在2017年和2018年的Black Hat USA大会上分享了相关成果。研究的重点集中在特斯拉自动驾驶电子控制单元(APE,软件版本18.6.1)的底层权限上。
论文首先介绍了背景,探讨了自动驾驶技术的快速发展及其潜在安全挑战。研究团队利用了APE的根级权限,对汽车控制器局域网(CAN Bus System)进行深入分析,特别是AEP2LB_CAN模块,这一部分涉及到了车辆通信协议的关键部分,通过CAN消息实现对车辆控制系统的远程操控。
在实验中,研究人员成功实现了无接触式远程控制转向系统,这是通过分析并利用CAN消息中的控制信息来实现的。他们优化了一种算法,生成对抗性示例(digital adversarial examples),针对那些完全依赖于摄像头数据做出决策的功能,如雨刮器和车道识别。通过这些优化后的攻击,他们在物理世界中成功地实施了对抗性示例攻击,这显示了潜在的安全漏洞。
对于车道检测功能,研究者发现了当车辆处于自动驾驶模式(Autosteer mode)时可能存在的一种高风险设计弱点。他们详细描述了车道检测器的实现细节,包括如何伪造或消除车道信息,以达到欺骗自动驾驶系统的目的。这种攻击可能对行车安全构成严重威胁。
论文结论部分总结了研究发现的重要性和对未来安全措施的建议,强调了在自动驾驶系统中确保安全性和鲁棒性的紧迫性。最后,引用了相关的研究文献,并在附录中提供了进一步的技术细节和实验步骤。
这篇论文揭示了特斯拉Autopilot系统中的关键安全漏洞,并展示了黑客可能利用这些漏洞进行恶意操控的可能性。这对于汽车行业和自动驾驶技术的发展具有重要的警示作用,也提出了加强安全防护和改进设计的迫切需求。
5
Preprocessing
We think Tesla is using a 12-bit HDR camera, possibly RCCB. The neural network
model for vision is not designed to process those images directly. Thus the program
needs to preprocess the image first.
As mentioned previously, the communication between different executable files (or
services) is going through the shared memory, including the original image fetched
from the camera. Those images are fetched from certain file handles according to a
schedule map.
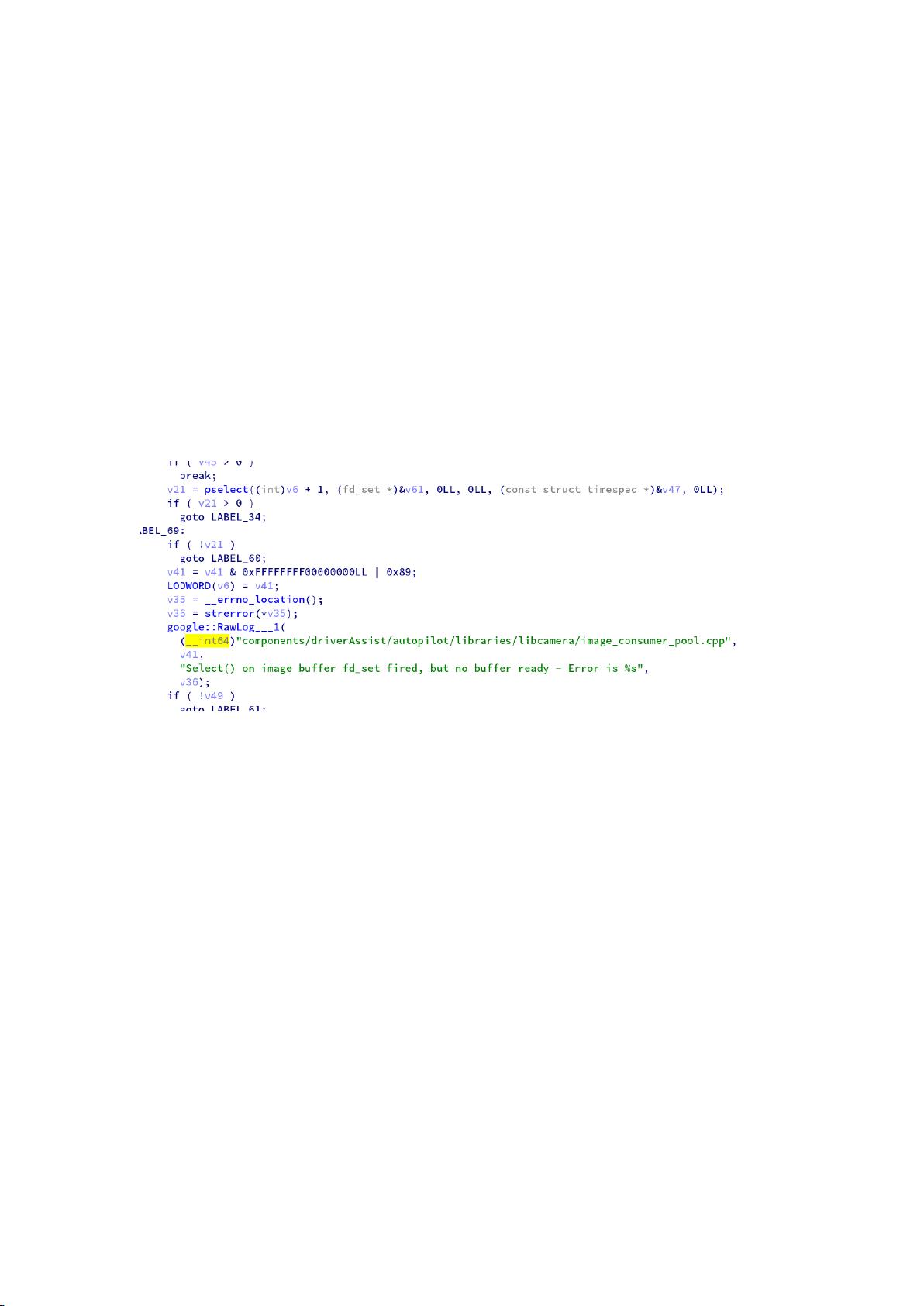
Fig 3. Buffers are managed by a select() model
Besides, the vision task would also take some control messages from /dev/i2c
and other shared memory areas. For diagnostic and product improvement purposes, a
copy of the image will also be saved into the shared memory, so the snapshot task
can get and send it. Snapshot task has a large number of record points in different
tasks, which makes debugging and feature development work more efficient.
The raw data gathered from the snapshot is in HDR, 1280x960 and 16-bit
little-endian integer, and the tone mapped image is shown below (may be inaccurate).

剩余39页未读,继续阅读
2024-09-08 上传
2023-01-09 上传
AttributeError: module 'tensorflow_core._api.v2.config' has no attribute 'experimental_list_devices'
2023-03-28 上传
2023-05-11 上传
2023-07-11 上传
2023-07-11 上传
2023-05-24 上传
2023-07-14 上传
2023-07-10 上传
2023-06-07 上传

有病没病都吃药
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
