YOLO:实时目标检测技术解析
需积分: 0 77 浏览量
更新于2024-07-01
1
收藏 1017KB PDF 举报
"YOLOv1是一种实时目标检测方法,由Joseph Redmon等人提出,它将目标检测视为回归问题,通过神经网络一次性预测图像中的边界框和类别概率,实现了检测性能的端到端优化。YOLO的基础模型可以以45帧/秒的速度处理图像,而FastYOLO则达到155帧/秒,且具有较低的假阳性率。尽管在定位准确性上可能存在不足,YOLO在泛化能力上优于DPM和R-CNN等其他检测方法,适用于自动驾驶、辅助设备和机器人系统等领域。"
YOLO,全称为"You Only Look Once",是一个创新性的目标检测算法,它颠覆了传统的基于分类器的目标检测方式。传统的检测系统通常会使用分类器在不同位置和尺度上检测目标,例如DPM的滑动窗口方法和R-CNN的区域提议网络。然而,YOLO将目标检测视为一个回归问题,通过一个单一的神经网络模型,一次性预测出图像中所有对象的边界框坐标及其所属的类别概率。
YOLO模型在设计上强调速度和效率,其基础模型可以实时处理图像,达到45帧/秒的速率。此外,为了进一步提升速度,FastYOLO被提出,它是一个轻量级版本,处理速度高达155帧/秒,同时在平均精度(mAP)方面优于其他实时检测器。YOLO的一个显著优点是其较低的背景误报率,即较少将非目标区域识别为目标,减少了误检测的情况。
YOLO的统一架构允许对整个检测流程进行端到端的优化,这意味着网络可以直接学习从输入图像到检测结果的映射,而无需额外的后处理步骤。这种设计不仅简化了系统,还提高了整体性能。在泛化能力上,YOLO表现优秀,无论是在自然图像还是艺术作品等其他领域的应用中,它都能比DPM和R-CNN等传统方法更好地捕捉和理解目标。
在实际应用中,YOLO的快速、准确的特性使其在自动驾驶、辅助设备和机器人技术等领域有着广泛的应用前景。例如,它可以用于实时分析驾驶环境,帮助车辆做出决策;在辅助设备中,YOLO可以帮助理解和解释用户周围的情境;在机器人系统中,YOLO则能助力机器人理解并适应复杂环境,执行各种任务。
YOLOv1通过将目标检测问题转化为回归问题,实现了一种高效且快速的检测方案,它的设计理念和性能优势对于推动计算机视觉领域的发展,尤其是在实时应用中,具有重要的意义。
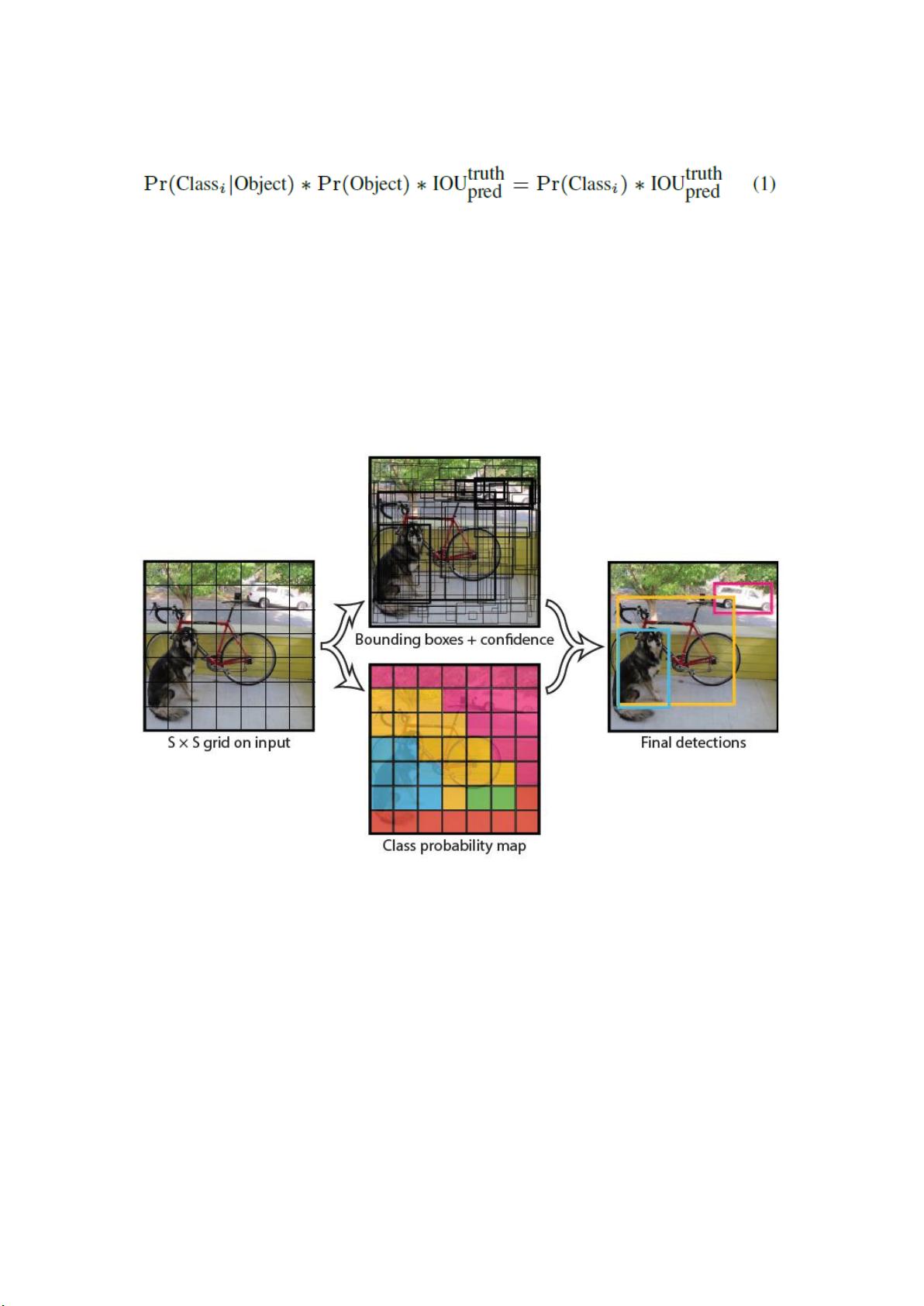
在测试时,我们乘以条件类概率和单个盒子的置信度预测值:
它为我们提供了每个框特定类别的置信度分数。这些分数编码了该
类出现在框中的概率以及预测框拟合目标的程度。
为了在 Pascal VOC 上评估 YOLO,我们使用 S=7,B=2。Pascal
VOC 有 20 个标注类,所以 C=20。我们最终的预测是 7×7×30 的张
量。
图 2:模型。我们的系统将检测任务构建为回归问题。它将图像分成 S×S 的网
格,并且对于每个网格单元都预测 B 个边界框、这些边界框的置信度以及 C 个
类别概率。这些预测结果被编码为 S×S×(B∗5+C)的张量。
2.1. 网络设计
我们将此模型实现为卷积神经网络,并在 Pascal VOC 检测数据
集[9]上进行评估。网络的初始卷积层从图像中提取特征,而全连接层
预测输出概率和坐标。
剩余22页未读,继续阅读
2022-08-03 上传
2023-09-04 上传
2023-03-28 上传
2023-05-02 上传
2023-07-27 上传
2023-04-04 上传
2023-08-07 上传

RandyRhoads
- 粉丝: 463
- 资源: 296
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
