S3C6410使用JLink调试教程
需积分: 9 161 浏览量
更新于2024-09-12
收藏 171KB PDF 举报
"S3C6410的JLink调试方法,包括安装RealView Developer Suite v2.2、JLink ARM V410i,使用AXDdebugger进行配置,并通过烧写U-BOOT到Nand启动调试。"
S3C6410是一款基于ARM11内核的微处理器,常用于嵌入式系统开发。在进行S3C6410的软件开发和调试时,通常会用到硬件调试工具,如JLink。本文将详细介绍如何利用JLink进行调试。
首先,你需要安装RealView Developer Suite v2.2,这是ARM公司提供的开发工具套件,包含了编译器、调试器等组件。安装过程中,遵循Readme.Txt文件中的指导进行操作,完成后可以在程序菜单中找到ARM -> RealView Developer Suite v2.2。
其次,安装JLink的特定版本,这里是Setup_JLinkARM_V410i.zip,注意必须是4.10版本,因为更高版本可能无法正常调试S3C6410。安装后,调试器会有两个选项:AXDdebugger v1.31和Realview Debugger v1.8。这里以AXDdebugger为例来说明如何使用JLinkV8。
在硬件准备上,确保开发板与JLink正确连接,然后给开发板上电。在AXDdebugger中,选择"Option" -> "Configure Target",添加Step2中安装路径下的JLinkRDI.dll文件,点击OK完成配置。
接下来,需要烧写适用于Linux 2.6.28的U-BOOT到Nand闪存中,并设置开发板为Nand启动方式。U-BOOT作为引导加载器,负责初始化PLL(锁相环)和DDR RAM,以便后续程序加载到内存中进行调试。烧写方法参照“TE6410开发板LINUX2.6.28用户手册.pdf”。
最后,一切就绪后,可以开始调试。开发板上电,打开AXDdebugger,通过"File" -> "Load Image"加载待调试的.axd文件。在使用RDS进行编译时,需注意在RealView Linker选项卡中设置RO Base选项。由于JLink不支持MMU(内存管理单元),无论U-BOOT是否进行了MMU地址映射,RO Base都应设置为实际地址,如0x50200000,这是S3C6410 DDR RAM的起始地址。
附带的6410_test.Zip是一个在RDS环境下的S3C6410测试工程示例,而Setup_JLinkARM_V410i.Zip则是JLink的安装程序,供读者参考实践。
总结来说,S3C6410的JLink调试涉及软件安装、硬件连接、目标配置、U-BOOT烧写和程序加载等多个步骤,每个环节都需要细心操作,确保调试过程的顺利进行。
S3C6410 的 JLink 调试 方法
保定飞凌
Step1
安装 RealView Developer Suite v2.2
具体安装方法参考 RVDS2.2 目录下的 Readme.Txt 文件
安装成功后会出现
程序 - 〉 ARM-> RealView Developer Suite v2.2
Step2
安装光盘上的 Setup_JLinkARM_V410i.zip
注意 一定好安装 4.10 版本。目前官网上最新的 4.14 版本不能正常调试 6410 。
Step3
正确安装 RDS2.2 后会出现两个调试器。 AXD debugger v1.31 和 Realview Debugger v1.8
这里以 AXD debugger 为例介绍 JLink V8 的使用。
正确连接开发板和 JLink 。给开发板上电
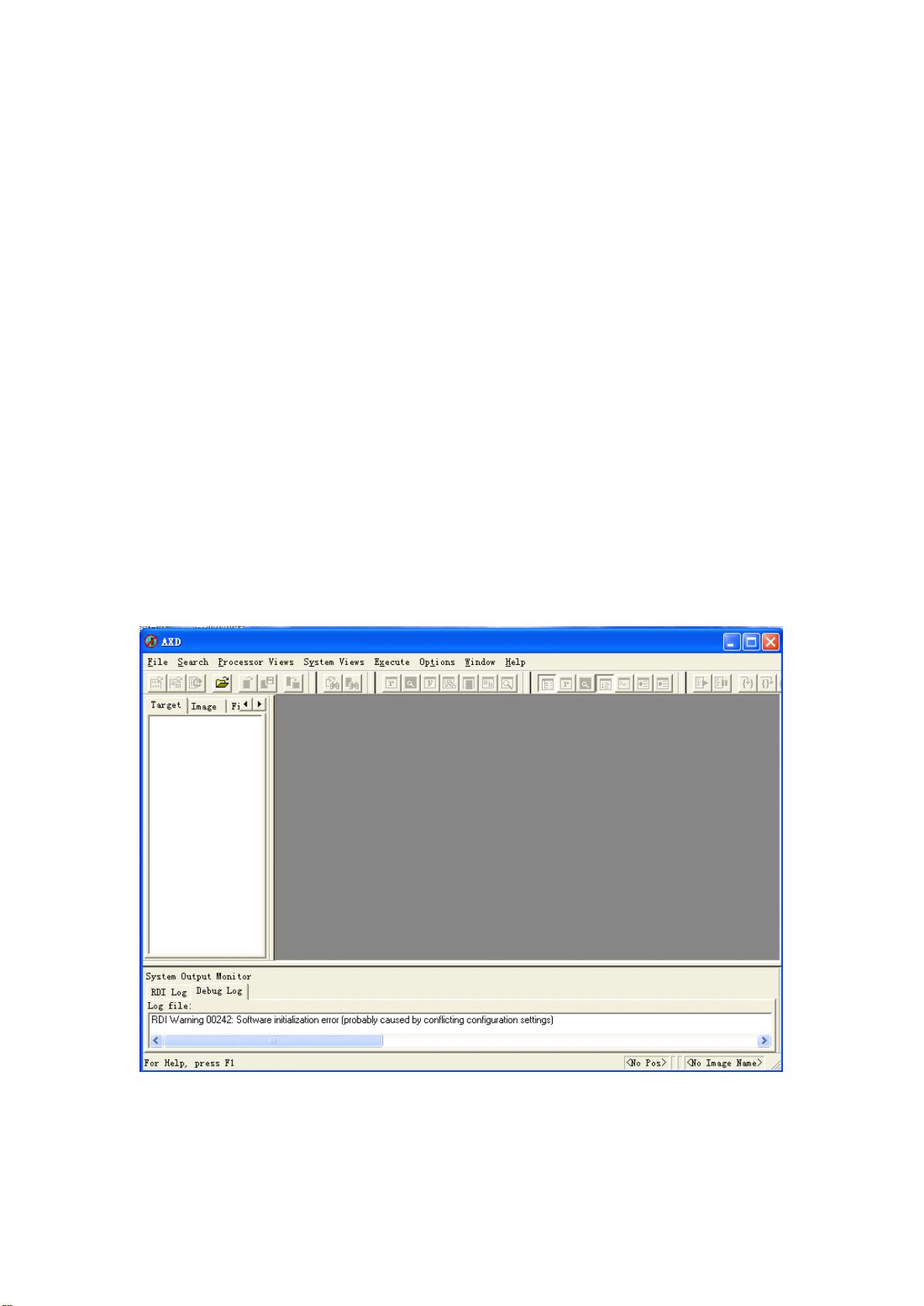
打开 AXD debugger.
Option->Configure Target
下载后可阅读完整内容,剩余3页未读,立即下载
2012-04-05 上传
2011-05-13 上传
2020-07-30 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-01-13 上传
2013-05-30 上传
点击了解资源详情

peter0532
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
