ABB机器人编程与安全指南
版权申诉
97 浏览量
更新于2024-07-05
收藏 989KB DOC 举报
"ABB机器人学习资料,包括安全指南、机器人简介、系统介绍和伺服驱动系统解析,以及IRC5控制系统的组件解析。"
ABB机器人学习资料是深入理解ABB机器人技术的关键资源,尤其对于初学者和专业人士而言。以下是这些知识点的详细说明:
1. 安全指南:
- 在自动模式下,禁止人员进入机器人工作区域,确保工作安全。
- 长时间闲置时,不应在夹具上放置工件,以避免意外启动造成的危害。
- 使用E-stop键可以紧急停止机器人运行,但会直接结束程序,无法继续执行。
- 编程、测试和维修时,需将机器人设置为手动模式。
- 调试期间,若无需移动机器人,应释放使能器,防止他人误操作。
- 进入工作区的调试人员应随时携带使能器,以防他人启动机器人。
- 停电时,需迅速关闭主电源并移除夹具上的工件,以保障安全。
- 只有经过授权的人员才能操作机器人。
2. ABB机器人简介:
- ABB自1974年生产出首台机器人,IRC5是其最新的控制器。
- IRB1410是常用的机器人型号,具有5KG的有效载荷和18KG的最大附加负载能力,工作半径可达1444mm,适用于焊接和搬运任务,且具备扩展外部轴的能力。
3. 机器人系统简介:
- 机器人由六个轴组成的六杆开链机构,可以到达其运动范围内的任意位置。
- 每个轴配备齿轮箱,运动精度在±0.05mm到±0.2mm之间。
- 使用AC伺服电机驱动,电机后有编码器和刹车,确保精确控制。
- 机器人带有串口测量板(SMB),用于保存数据。
- 手动松闸按钮用于维修,非正常操作可能造成设备损坏或人员伤害。
- 平衡气缸或弹簧用于保持稳定。
4. 伺服驱动系统:
- 伺服驱动系统是机器人运动的核心,包括AC伺服电机和编码器,提供高效的动力和反馈。
5. IRC5控制系统:
- IRC5系统由主电源、计算机供电单元、控制模块、输入/输出板、用户连接端口、FlexPendant接口、轴计算机板和驱动单元组成。
- 控制器分为操纵器、控制模块(含控制电子装置)和驱动模块(含电源电子装置)。
- RobotWare光盘包含所有机器人软件,而说明书光盘提供了操作指南。
- RobotStudio Online软件可在个人电脑上模拟机器人操作,便于离线编程和调试。
这些内容涵盖了ABB机器人操作的基础知识,对于学习和掌握ABB机器人的编程、安全操作和系统维护至关重要。通过深入理解和实践,可以提升对ABB机器人的全面掌控能力。
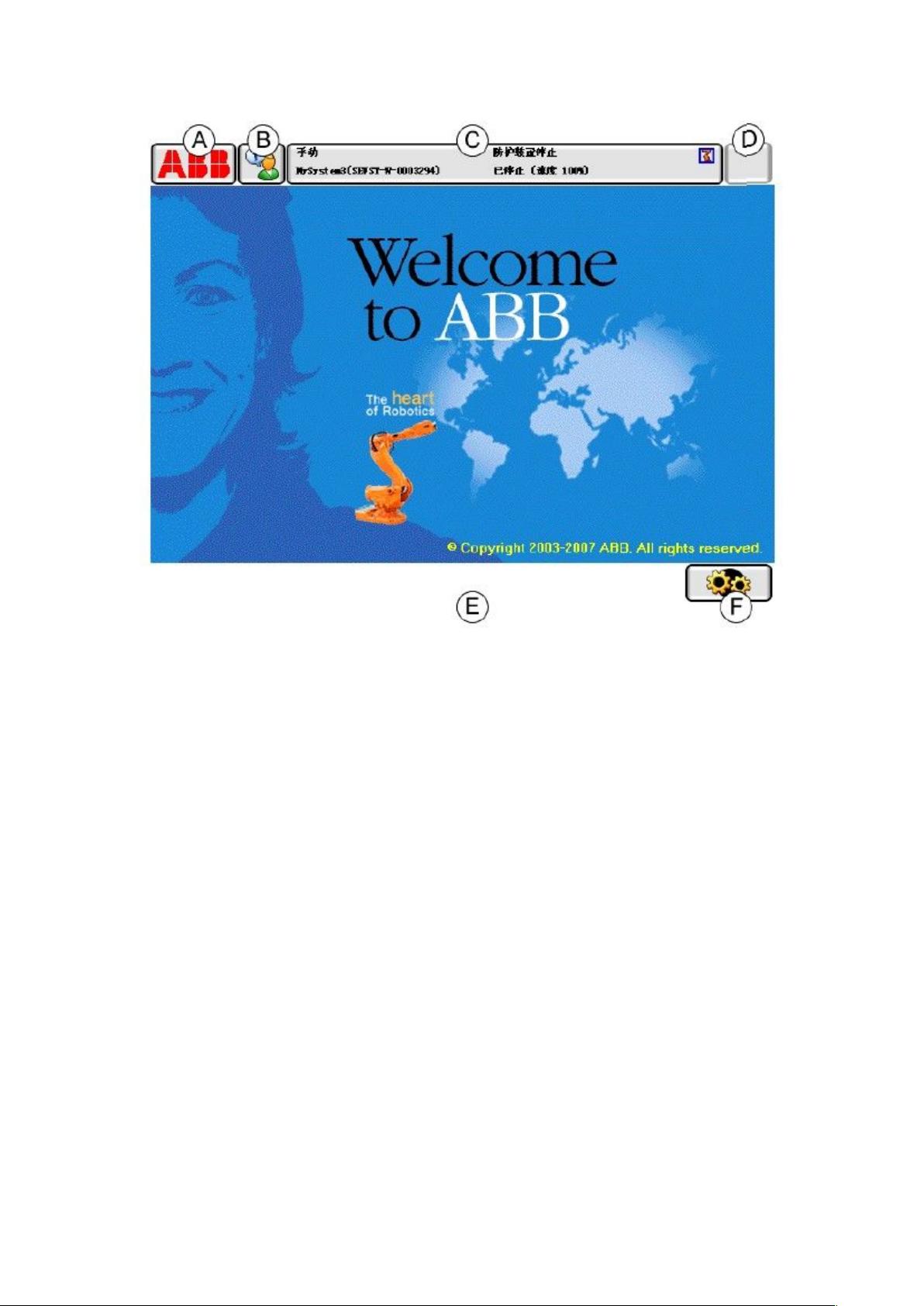
初始界面
A ABB菜单、B 操作员窗口、C 状态栏、D 关闭按钮、E 任务栏、F " 快速设置" 菜单
8、坐标系统〔和 KUKA 的一样〕
Tools coordinates 工具坐标系、Base coordinates 根本坐标系、World coordinates 大地
坐标系、Work Object 工件坐标系。
9、手动操作机器人
剩余22页未读,继续阅读
2024-05-11 上传
2021-10-10 上传
2022-03-29 上传
2022-04-10 上传
2022-03-29 上传
2022-03-29 上传
2022-03-14 上传
2021-11-08 上传
2022-01-31 上传

学习使人快乐张
- 粉丝: 101
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
