ROS讲义精华:指令与通信详解
需积分: 14 127 浏览量
更新于2024-09-03
收藏 531KB PDF 举报
本学习笔记是关于Robot Operating System (ROS)的详细介绍,特别是针对思慕课程中所教授的内容。ROS是一个开源的机器人操作系统,主要用于简化机器人软件的开发过程,通过模块化和标准化的方式促进跨平台通信和协作。本资料涵盖了ROS的基本概念、安装与配置、以及其主要组件的使用。
1.1 ROS概述:
ROS最初由 Willow Garage公司开发,支持多种编程语言,如C++和Python,通过ROS的软件包管理器和消息传递系统实现不同节点之间的通信。ROS的核心思想是将复杂的问题分解为独立的组件,每个组件作为一个节点运行,通过话题(Topic)和服务(Service)进行通信。
1.2 ROS架构:
ROS主要分为两部分:ROS Core(基础框架)和ROS Distribution(发行版)。ROS Core提供了一套标准接口和服务,而ROS Distribution则是特定版本的软件包集合。ROS Core的组成部分包括Nodelets(轻量级节点)、参数服务器、消息队列等。
2. Catkin工具:
Catkin是ROS的一个工具套件,用于构建、打包和管理ROS项目的构建流程。它简化了ROS开发过程中的依赖管理和构建步骤:
2.1 Catkin工作流:
- Catkin Workspace(猫kin工作空间)用于组织和管理项目源代码。
- 使用`catkin_make`或`catkinbuild`命令构建软件包,确保所有依赖项正确安装。
- `setup.bash`脚本在启动时加载,设置环境变量以便于编译和运行ROS节点。
- `roslaunch`用于执行预定义的launch文件,快速启动多个节点。
2.2.1 Catkin的CMake集成:
Catkin使用CMake作为构建工具,它提供了一个`find_package()`函数来查找和管理依赖项,并利用`pkg-config`来解决库链接问题。CMakeLists.txt文件是每个软件包的构建配置文件,通过Catkin工作流,可以自动处理ROS特有的构建逻辑。
本学习笔记提供了对ROS基础知识和实践操作的深入理解,对于理解和开发基于ROS的机器人系统具有很大的参考价值。学习者可以借此笔记回顾ROS的体系结构、安装配置方法,以及如何使用Catkin工具有效地管理软件包和构建过程。
liang-j14@tsinghua.org.cn 3 PACKAGE^‡•
2.2.3 ¦^Catkin?1?È
? È Ú ½ ë „ /? È ¦ ^ è •0 Ü ©" I ‡ 5 ¿ ´§ catkin? È ƒ c ‡ £ ó Š ˜ m 8
¹§/catkin make03Ù¦´»e?Èج¤õ"?Ȥ§XJk#8I©‡)(5vk)§
@o˜„;‹X‡sourceM#‚¸§¦XÚUéfâ?È)¤ROSŒ‰1©‡"
3 Package^‡•
ROSpackage´catkin?ÈÄü§´/catkin make0é–"C++ÚPython“èÑI‡˜
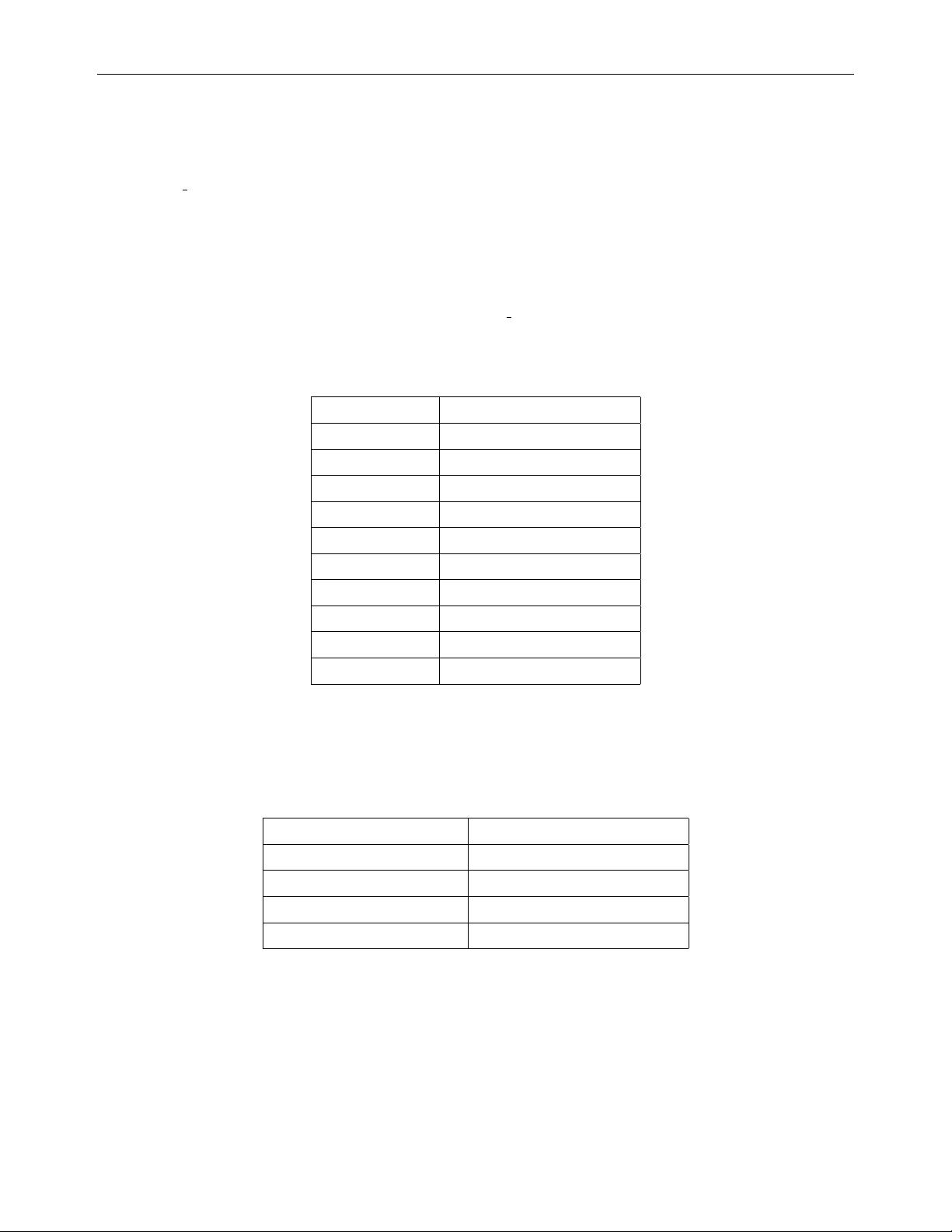
package¥âU?È"˜‡•p~„©‡!´»kµ
L 2: ROS•(
©‡/©‡Y¶ &E
CMakeLists.txt package?È5K(7L)
package.xml package£ã&E
src/ “詇
include/ C++Þ©‡
scripts/ Œ‰1
msg/ g½ÂžE
srv/ g½ÂÑÖ
models/ 3D.©‡
urdf/ urdf©‡
launch/ launch©‡
3.1 packageƒ'·-
L 3: packageƒ'·-
rospack help w«rospack^{
rospack list ÑŤkpackage
rospack depends [package] w«package•6•
rospack find [package] ½ ,‡package
rospack profile M#¤kpackage ˜P¹
±þ·-XJpackage"Ž§K%@•c8¹(XJc8¹•¹package.xml)"
3
剩余12页未读,继续阅读
122 浏览量
567 浏览量
106 浏览量
294 浏览量
801 浏览量
2021-10-01 上传
152 浏览量









