
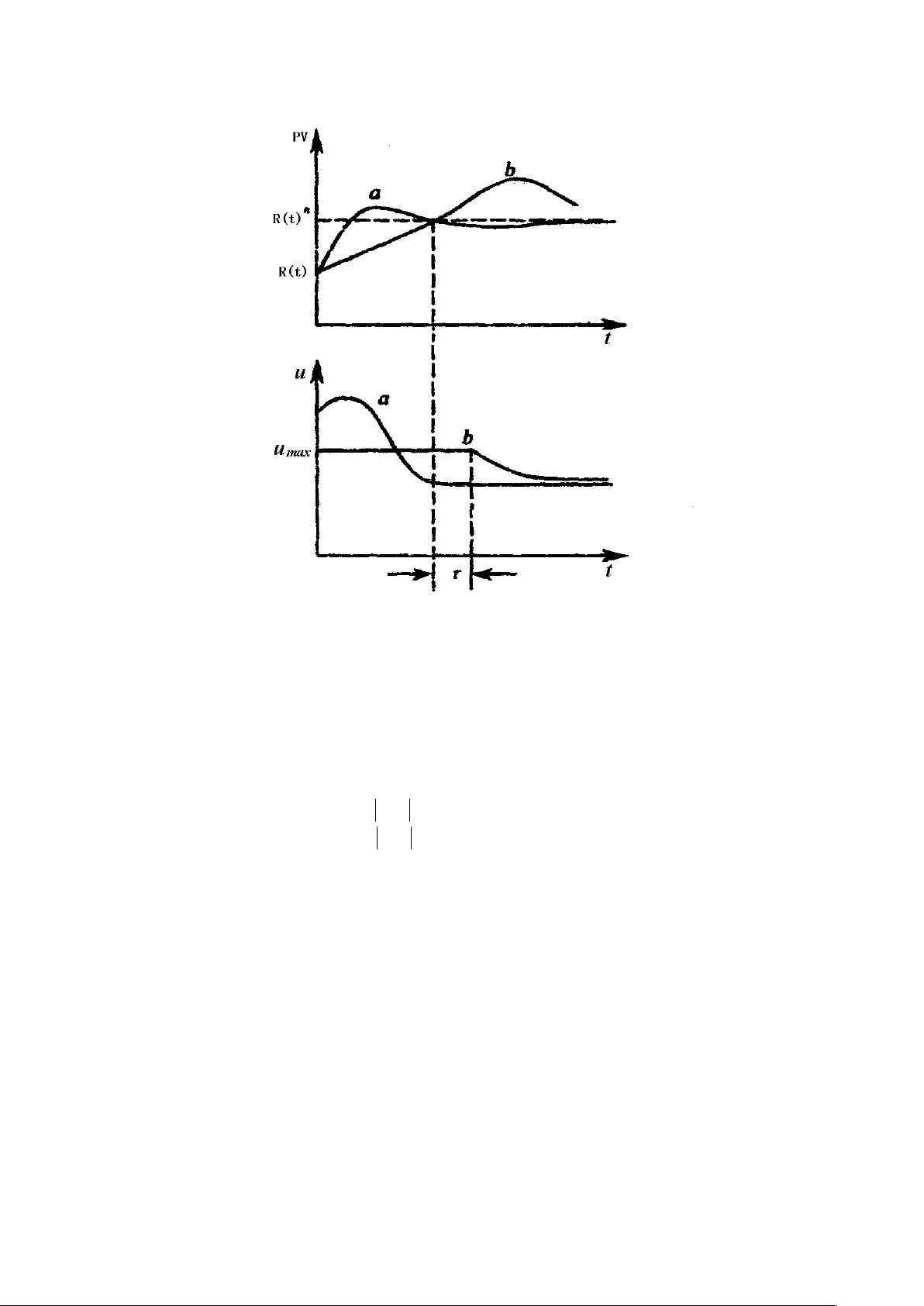
图 4-4 系统存在积分饱和时控制器输出 u(t)
其中β按下式取值:
(4-9)
采用积分分离 PID 控制算法后,控制效果如图(4-5)所示。由图可见,采用
积分分离 PID 控制算法使得控制系统的性能有了较大的改善。
�
�
�
�
�
�
�
�
�
)(0
)(1
ke
ke
当
当
剩余27页未读,继续阅读

老帽爬新坡
- 粉丝: 85
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







