机器学习方法在路径规划领域的综述及算法研究现状
119 浏览量
更新于2024-01-26
1
收藏 1.99MB PPTX 举报
路径规划技术是机器人研究领域中的重要分支,它解决了在工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径的问题。路径规划的发展现状包括静态结构化环境下的路径规划、动态已知环境下的路径规划和动态不确定环境下的路径规划。在路径规划算法方面,我们可以分为基于采样的方法(如Voronoi, RRT, PRM)、基于节点的方法(如Dijkstra, A*, D*)和基于数学模型的算法(如MILP, NLP)。此外,一些生物启发的算法也被用于路径规划。一些典型的路径规划算法包括A*、D* 算法、人工势场法(APF)、快速搜索随机树(RRT)。
以最优准则为基础,路径规划技术旨在解决始于初始点止于目标点、避障和尽可能寻找最优路径的问题。静态结构化环境下的路径规划通常指的是环境不会发生变化的情况下的路径规划方法,在这种情况下,机器人能够事先得到地图信息,并能够对其进行路径规划。而动态已知环境下的路径规划则是指机器人能够感知到环境的变化,并能够根据环境的变化做出相应的路径规划调整。动态不确定环境下的路径规划则是指机器人无法准确知道环境的变化,或者环境的变化有很多不确定性。
在路径规划的算法方面,基于采样的方法通常通过对环境进行采样,从而得到环境的特征点,并利用这些特征点进行路径规划。这种方法的优点是适用于各种类型的环境,但是采样的过程可能会比较耗时。基于节点的方法则是通过对环境进行图模型的建立,从而可以利用图算法进行路径规划。这种方法的优点是可以减少规划的时间,但是在环境非常复杂的情况下可能会出现规划失败的情况。基于数学模型的算法则是通过建立数学模型,从而可以利用数学优化算法进行路径规划。这种方法的优点是可以得到最优的路径,但是在环境非常复杂的情况下可能会出现计算时间过长的情况。
综合而言,路径规划技术在机器人研究领域中扮演了重要的角色。未来随着人工智能和机器学习的不断发展,路径规划技术将会更加智能化和高效化,为各种类型的机器人提供更加可靠和高效的路径规划方案。同时,路径规划技术也将会与其他相关技术相结合,如SLAM技术、感知技术等,从而实现更加复杂和完整的机器人系统。路径规划技术的应用也将会更加广泛,不仅局限于工业领域,还包括智能家居、服务机器人等各个领域。路径规划技术的研究和应用前景是非常广阔的,值得我们继续深入探索和研究。
2.
2.
路
路
径
径
规
规
划
划
算
算
法
法
分
分
类
类
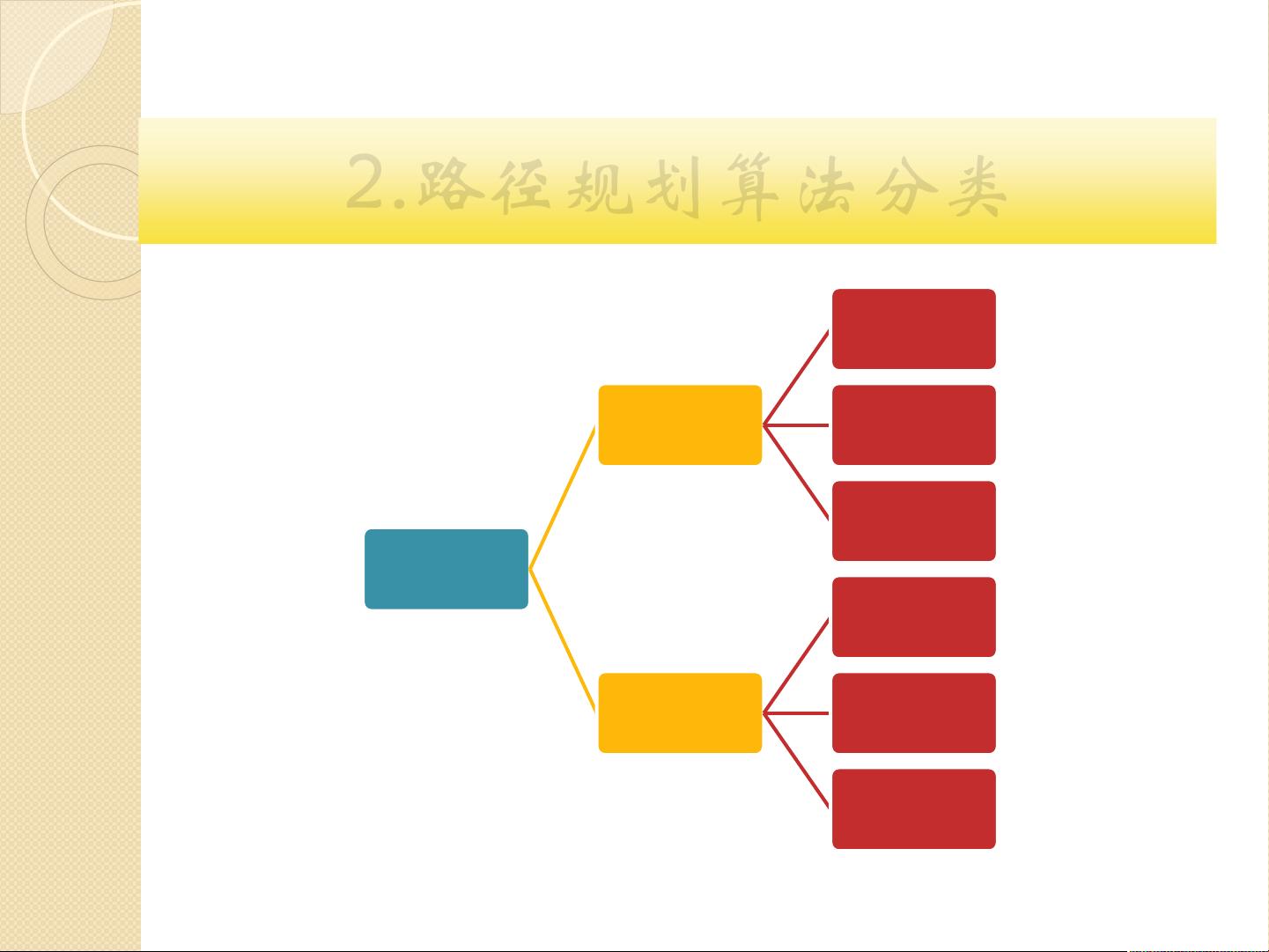
路径规划算
法
传统算法
模拟退化法
人工势场法
etc
智能算法
遗传算法
神经网络算
法
etc
剩余33页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-05-28 上传
2023-10-24 上传
2023-10-19 上传
2023-10-10 上传
2023-10-24 上传
2023-10-16 上传

wukangjupingbb
- 粉丝: 189
- 资源: 406
 我的内容管理
展开
我的内容管理
展开







