PSO与ILS融合算法解决混合Flowshop维护调度问题
18 浏览量
更新于2024-08-26
收藏 1.57MB PDF 举报
本文研究的是"具有维护活动的混合Flowshop调度问题的混合粒子群优化算法"(HybridParticleSwarmOptimizationforHybridFlowshopSchedulingProblemwithMaintenanceActivities),由Jun-qing Li、Quan-ke Pan和Kun Mao三位作者共同完成,分别来自中国东北大学过程工业合成自动化国家重点实验室和聊城大学计算机科学学院。该研究发表于2014年,旨在解决在混合Flowshop环境下,考虑预防性维护(PM)活动的生产调度难题。
混合Flowshop是一种复杂的生产系统模型,其中包含多个加工站,不同工件需按照特定路径通过这些站,并且可能涉及到不同类型的维护任务,如定期检查、维修或更换设备部件等。这类问题对优化技术提出了挑战,因为它不仅要考虑加工顺序的效率,还要确保维护活动不会中断生产流程并最小化停机时间。
本文的核心贡献是提出了一种结合粒子群优化(PSO)和迭代局部搜索(ILS)的混合算法。PSO是一种模仿鸟群觅食行为的优化算法,它通过群体协作寻找最优解,而ILS则是一种局部搜索策略,用于在当前搜索区域寻找更好的解。两位作者深入探讨了在该混合算法中应用的不同交叉操作和变异操作,以提高搜索效率和解决方案的质量。
他们针对混合Flowshop调度问题的特点,设计了适应性的遗传操作,使得粒子能够有效地在全局和局部搜索之间切换,从而更好地探索问题空间。此外,为了增强算法的收敛性和稳定性,可能还考虑了适应性权重调整、邻域结构的选择以及动态更新策略等因素。
该研究的意义在于,通过实验证明了这种混合方法在处理具有维护活动的混合Flowshop调度问题时,相较于传统方法有显著的优势,能够在保证生产效率的同时,有效管理维护需求,降低整体生产成本。文章的最后部分可能会展示实验结果、对比分析以及其他可能的影响因素,以证明其在实际工业环境中的实用价值。
这篇研究论文提供了混合Flowshop调度问题的一个新颖解决策略,对于工业工程、运营管理以及优化理论等领域都有一定的参考价值。同时,它也展示了将PSO和ILS结合起来优化复杂问题的潜力,这为未来的优化算法设计提供了新的思路。
e Scientic World Journal
Step 1. Generate an initial solution ;let
=and
∗
=.
Step 2. Generate a certain number of neighboring solutions
around the given solution
, nd the best neighboring
solution
, and update the best solution found so far.
Step 3. Let =Accept(
,).
Step 4. If the stop condition is not satised, generated
=
perturb(), go back to Step ; otherwise, stop the algorithm.
3.2. Particle Swarm Optimization. In , mimicking the y-
ing behavior of a swarm of birds, a novel optimization algo-
rithm named particle swarm optimization (PSO) was devel-
oped by Kennedy and Eberhart, which has been veried e-
cient for solving both continuous and discrete optimization
problems []. During recent years, many researchers have
applied PSO for solving lots of optimization problems [–
].
e owchart of the canonical PSO is given as follows.
Step 1. Set the system parameters, such as the initial popula-
tion size, the possibility (
𝑙
) for learning from local best, and
the possibility (
𝑔
) for learning from the best solution found
so far.
Step 2. Generate the initial population of particles.
Step 3. Store each particle into a vector named local best,
where each solution corresponds to the local best of the
corresponding particle. Memorize the best solution found so
far.
Step 4. For each particle, perform the following steps until
the stop condition is satised.
Step 5. Randomly generate a number
1
between and , if
1
is less than
𝑙
, and then perform the learning process from
the local best of the current particle.
Step 6. Randomly generate a number
1
between and , if
1
is less than
𝑔
, and then perform the learning process from
the global best of the current particle.
Step 7. Record the local best for each particle and the global
best found so far.
Step 8. Learn by itself.
Step 9. Go back to Step .
4. Framework of the Proposed Algorithm
4.1. Solution Representation. For solving the HFS scheduling
problems with PM activity, we use the permutation represen-
tation mechanism. Give a HFS scheduling problem jobs,
stages, and machines; each solution is represented by a
vector of integer values, where each integer value represents
a job number. erefore, the length of the solution equals the
number of jobs. For example, for a HFS problem with ten jobs
2 3 1 5 6 8 4 9 10 7
J
2
J
2
J
3
J
6
J
8
J
4
J
9
J
7
J
1
J
10
F : Solution representation.
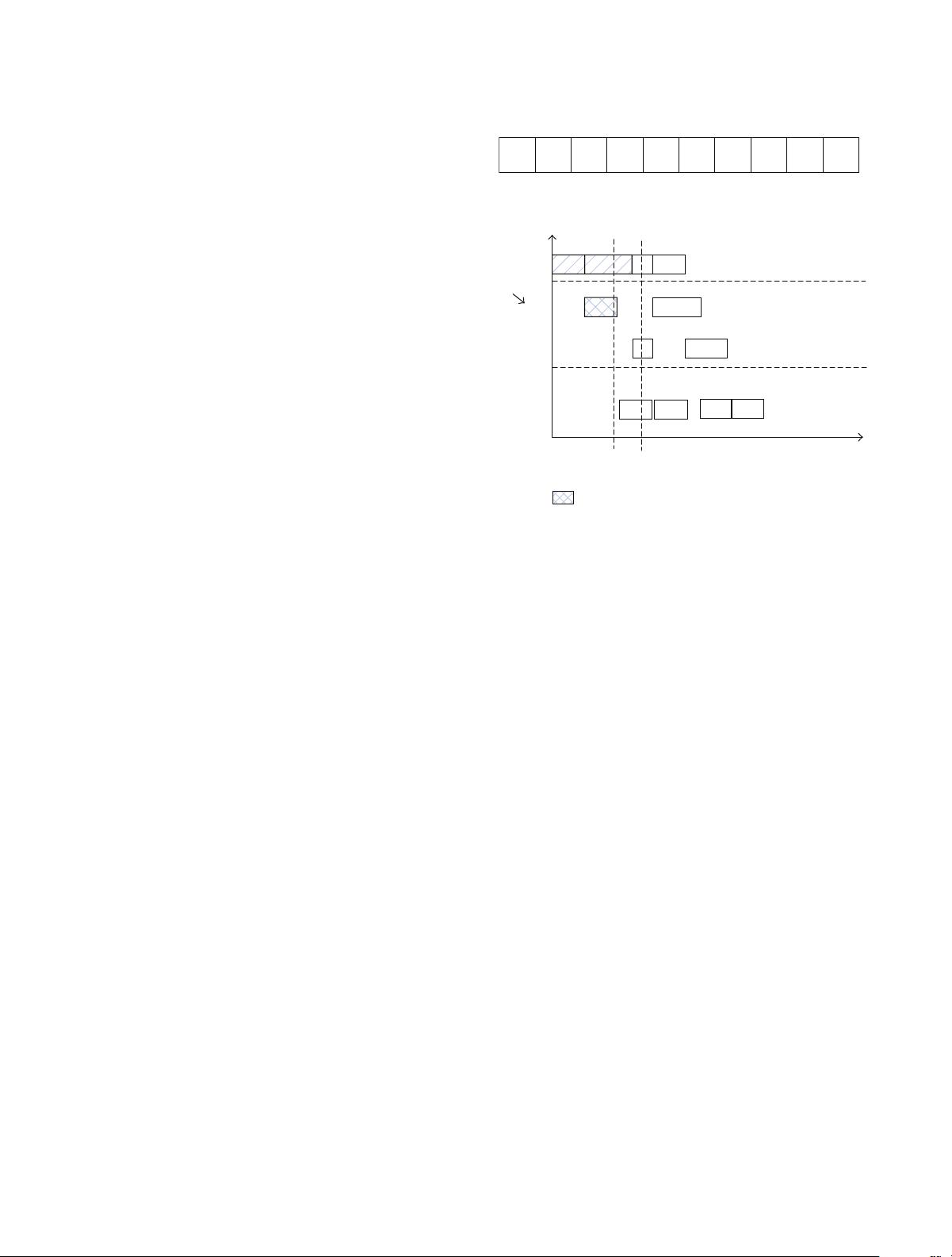
Stage 2
Stage 1
Stage 3
PM
Aected operation
M
1
M
2
M
3
M
4
J
2
J
2
J
3
J
4
J
1
J
1
J
1
J
3
J
3
J
2
J
4
J
4
t
1
t
2
F : Situation of PM activity.
and three stages, Figure gives one solution representation,
where the scheduling sequence is
2
,
3
,...,and
7
.
e sequence in Figure is only for the rst stage; that
is, at the rst stage, each job is scheduled according to the
above sequence, while for the following stages, the decoding
mechanism is given as follows.
4.2. Decoding without Disruption. Itcanbeseenfromtheso-
lu-tion representation that the machine selection is not in-
cluded in the solution representation. e decoding for the
above solution representation is given as follows.
Step 1. For the rst stage, each job is scheduled according to
their sequence in the solution representation. In Figure the
rst job to be scheduled is
2
and the last one is
7
.Eachjob
selects the rst available machine.
Step 2. In the following stages, each job is to be scheduled just
aer its completion of the previous stage, and select the rst
available machine from the candidate machines.
4.3. Decoding with PM Activity. When considering the PM
activity, that is, at time , there is a PM activity occurring on
agivenmachine
𝑘
. en two situations we should consider,
that is, the rst is that when an operation is just being pro-
cessed on
𝑘
when the disruption event occurs. e second
situation is that the aected machine
𝑘
is idle and no op-
eration is aected by the PM activity.
(1)Situation 1. For the rst situation, an operation is aected
by the PM activity. Figure gives the example chart for the
situation. From Figure ,wecanseethat,attimepoint
1
,the
machine
2
shows a PM activity. It will restart its work at
剩余11页未读,继续阅读
132 浏览量
点击了解资源详情
点击了解资源详情
162 浏览量
132 浏览量
2021-09-29 上传
2021-03-13 上传
133 浏览量
2021-03-14 上传

weixin_38675341
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
