风电高渗透下的线性主动干扰抑制负荷频率控制
28 浏览量
更新于2024-08-27
收藏 1.36MB PDF 举报
"这篇研究论文探讨了线性主动干扰抑制在高渗透风能下的负荷频率控制问题。随着风能转换系统的快速发展,电力系统的负荷频率控制面临着根本性的变化,主要关注于保持发电与负荷的平衡以及干扰的消除。文章提出了一种针对基于双馈感应发电机的风力发电厂的新电网负荷频率控制方法。线性主动干扰抑制控制方法的主要特点是能够实时估计并消除总干扰,因此为解决负荷频率控制问题提供了一种可行的解决方案。此外,文中还提到了双馈感应发电机(DFIG)、风能转换系统(WECS)以及混合粒子群优化(HPSO)等相关技术的应用。"
这篇研究论文聚焦于电力系统中的负荷频率控制(LFC),特别是在风能高度渗透的背景下。传统的负荷频率控制策略由于风能等可再生能源的不稳定性而面临挑战。作者提出了线性主动干扰抑制控制(LADRC)作为应对这一问题的新方法。LADRC技术的核心在于其能够实时估算并抵消系统中的干扰,从而保持系统的稳定性和效率。
在风力发电系统中,双馈感应发电机(DFIG)扮演着关键角色。DFIG允许在风速变化时调整发电机的输出功率,以适应电网需求。论文中提出的控制策略特别适用于基于DFIG的风力发电厂,旨在改善负荷频率控制性能,确保电力供需平衡。
此外,风能转换系统(WECS)是将风能转化为电能的关键组成部分,其性能直接影响到整个电力系统的稳定性。随着风能渗透率的提高,WECS的动态响应和控制策略必须得到优化以应对不断变化的风速和电网条件。
论文还提到了混合粒子群优化(HPSO)算法的应用。这是一种优化工具,用于寻找控制参数的最佳设置,以提升LADRC策略的效果。通过HPSO,可以更有效地调整控制系统,增强对系统扰动的抑制能力,进而提升整个电网的频率稳定性。
这篇研究论文提出了一种创新的LADRC方法,用于处理高风能渗透率情况下的负荷频率控制问题。结合DFIG、WECS和HPSO等技术,该方法有望为风力发电厂提供更高效、更稳定的运行方案,同时提高电力系统的整体性能。
induction generator (DFIG)-based WECS in MATLAB/Simulink. The
obtained results are compared with the traditional PI controller [9]
and Fuzzy-PI controller [44]. To demonstrate the effectiveness of
the proposed control scheme, the overshoot of frequency devia-
tion, settling time and Integration of Time multiplied by Absolute
Error (ITAE) will be used to evaluate the control performance.
Finally, the robust performance testing based on Monte-Carlo
approach is carried out.
The rest of the paper is organized as follows: in Section 2 the
principle of DFIG-based WECS control issue based on the frequency
change is presented. Then, power system models used for frequen-
cy regulation test are proposed. The control strategy proposed is
described in Section 3. Simulation results and discussions are
shown in Section 4. Finally, conclusions are given in Section 5.
2. Models for LFC
The DFIG-based WECS has the ability to generate power with
variable mechanical speed and extract the kinetic energy stored
to support the frequency regulation [6]. Details about the principle
of frequency control for DFIG-based WECS and the models adopted
by the LFC for the power systems with DFIG-based WECS will be
presented in this section.
2.1. The principle of frequency control for DFIG-based WECS
In this paper, the wind power generation based on DFIG-based
WECS is considered.
In steady state, in order to maintain a desired speed holds. How-
ever, the electronic converter is able to control the active power
output arbitrarily, and almost instantly, by resorting to the kinetic
energy stored in the rotational masses. This translates into a
change in the rotational speed, which can take place only for a
short period of time in order to assure that remains inside its
operational limits.
Fig. 1 depicts the most commonly used variable-speed machi-
nes for wind energy conversion systems. p
in
= p
out
holds in order
to maintain a desired speed
x
e
in steady state. However, the active
power output can be controllable for the electronic converter dis-
cretionarily, and almost instantly, by resorting to the kinetic ener-
gy stored in the rotational masses. This is translated into a change
in the rotational speed,
x
e
that can take place only for a short peri-
od of time with its operational limits inside [33].
Two important features of the above mentioned WECS must be
taken into account to develop a control strategy:
As a result of depending on the wind, the primary power source
cannot be controlled.
Wind generators can provide varying active power.
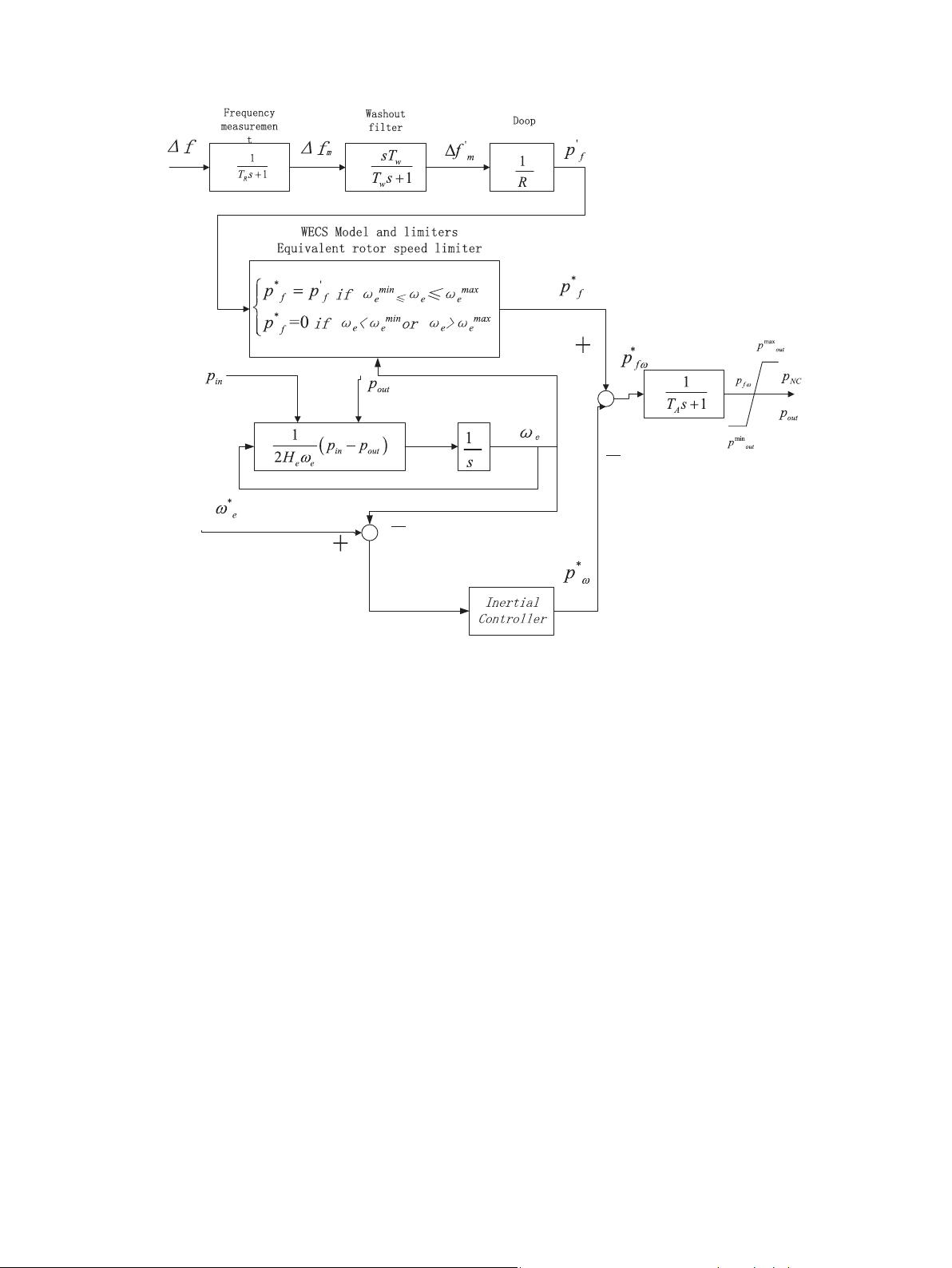
The frequency control strategy for DFIG-based WECS used in this
paper relies on a conventional primary regulation, when the WECS
performs in a transient way. As mentioned above, wind generators
only can perform in a transient manner utilizing the stored kinetic
energy. In this approach, inertia of WECS contributes to that of the
rest of the power system, which is different from the inertial control
in earlier works. Since WECS hold the capability of fast power injec-
tion, the frequency regulation can take advantage of their faster
response [33]. Previous works do not exploit the advantage, making
non conventional generators behave like conventional generators
[34]. Adopted DFIG-based WECS takes advantage of their faster
response to support the LFC, as provided in Fig. 2. As the system
Fig. 2. The frequency control strategy for DFIG-based WECS.
Y. Tang et al. / Energy Conversion and Management 95 (2015) 259–271
261
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-07-07 上传
2021-05-31 上传
2021-02-10 上传
2021-02-21 上传
2021-02-21 上传
135 浏览量

weixin_38723516
- 粉丝: 4
- 资源: 982
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
