"仿生六足爬行机器人机械结构设计:CAD与SolidWorks应用及装配关键"
版权申诉
125 浏览量
更新于2024-03-07
收藏 3.47MB DOC 举报
本文描述了针对仿生生态六足爬行机器人步进足的要求和特点进行的机械结构设计。首先使用Cad软件设计了机器人结构零部件的尺寸,并考虑了整体结构尺寸。随后,利用SolidWorks软件进行了实体零部件建模,并进行结构装配以检查设计尺寸的合理性,以更好地实现最终设计结果,使其能够运动起来。在整个设计过程中,装配是关键,位置要求都要在装配过程中尝试着设计。文章的关键词包括仿生、机器人、结构设计、零部件和装配。
整个设计过程从对六足爬虫机器人的步进足规划要求和特点进行分析开始。通过对实体机器人结构尺寸的利用软件Cad进行设计,得到了机器人结构零部件的尺寸,以及整体结构尺寸。然后,利用软件SolidWorks对实体零部件进行造型,进而进行结构装配来检查各个尺寸设计是否合理的目的,以更好的实现最终的设计结果,让它运动起来。在整个过程中,装配是关键,位置要求都要在装配过程中去尝试着设计。
总的来说,这篇文章主要描述了针对六足爬行机器人的机械结构设计的过程。文章通过对机器人结构的尺寸进行了设计和检查,最终实现了机器人的运动功能。这种结构设计方法可以为机器人的功能实现提供技术支持,并最终在实际应用中发挥出更大的作用。
但在研究中也有不足之处。在机器人结构设计的过程中,并没有充分考虑到环境因素,这也是今后需要改进的地方。另外,在结构装配过程中,应该更加注重位置要求的设计,以及对装配过程中产生的问题进行更好的解决。因此,今后的研究方向应该更多地考虑到环境因素对机器人设计的影响,并进一步完善装配过程中的问题解决方案。
总的来说,这篇文章最终实现了六足爬虫机器人的机械结构设计,但在实际应用中还有一定的改进空间。对于六足爬虫机器人的机械结构设计,在今后的研究中还需要更多地关注环境因素的影响,并继续完善结构装配过程中的问题解决方案。希望通过今后的研究,能够更好地实现六足爬虫机器人的功能,并为其在实际应用中发挥出更大的作用。
1 引言
仿生态六足六足爬行机器人是一种基于仿生学原理研制开发的新型足式机
器人。仿生态六足六足爬行机器人比传统的轮式机器人有更好的移动性,自动化
程度高,具有丰富的动力学特性。此外,足式机器人采用类似生物的爬行机构进
行运动,比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、
坎等),并且机器人足所具有的大量自由度可以使机器人的运动更加灵活,对凹
凸不平的地形的适应能力更强;足式机器人的立足点是离散的,跟地面的接触面
积较小,因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的
情况下,通过严格选择足的支撑点,也能够行走自如。因此,仿生态六足六足爬
行机器人的研究已成为机器人学科中一个引人注目的研究领域[1]。本文在对一
些六足昆虫的行走过程进行观察和详细测量的基础上设计了这款仿生态六足六
足爬行机器人,它具有轮式和履带式机器人所没有的优点,在航空航天(登月,
火星探测)、工农业生产(物流自动化、西部大开发、机械设备的探测和检
修),军事国防等领域有广泛的应用前景。
2 仿生态六足爬行机器人的步态爬行原理
2.1 足部行走模型
“六足纲”昆虫多以交替的三角步态运动进行直线行走,即行走时有 3 条腿
同时着地,另外 3 条腿迈步,中间腿向上提时一侧前后腿向前迈,另一侧前后腿
向后摆,通过与地面之间的摩擦力来实现机器人的前进;并以一侧迈大步、另一
侧迈小步的方式实现转向。项目组在对一些六足昆虫的行走过程进行观察和详细
测量的基础上对其三角步态进行了优化和创新,设计了一款新型六足仿生机器人,
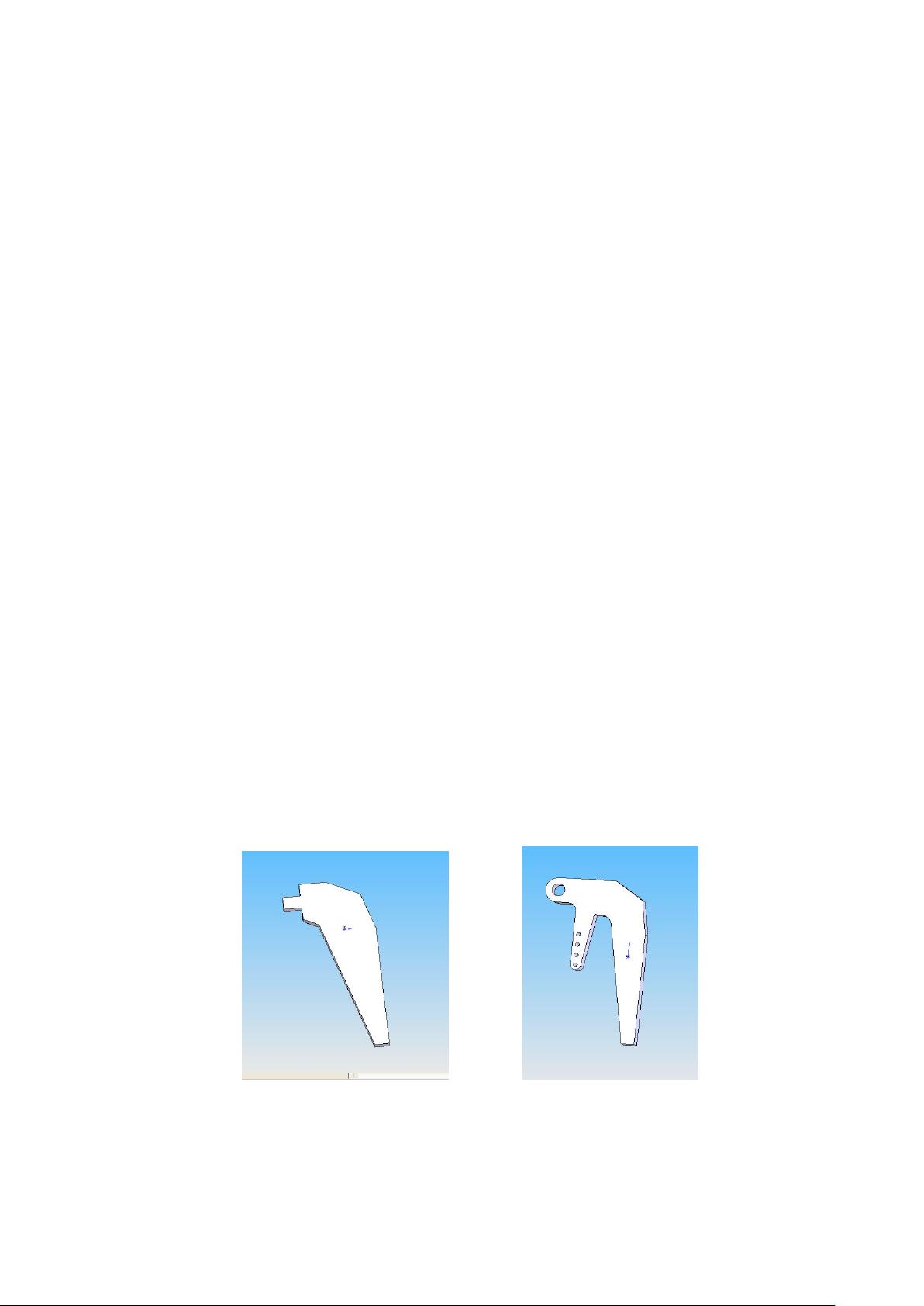
图 1 为前后足部三维实体图,
图 1 前后腿部结构实体图 图 2 后腿结构实体图
图 2 为中间足部三维实体图。该机器人各足均采用图 1、图 2 所示的整体式结构,
每条腿具有 1 个关节,1 个自由度,而且一侧的前后腿用连杆连接起来,形成联
剩余17页未读,继续阅读
2023-07-12 上传
2023-07-02 上传
2020-12-01 上传
2022-09-23 上传
2023-07-15 上传
2022-05-13 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
