线性RGB-D SLAM:一种平面环境的高效方法
110 浏览量
更新于2024-06-20
收藏 2.44MB PDF 举报
"这篇论文提出了一种新的线性RGB-D SLAM方法,它结合了平面特性,特别是适用于平面环境。该方法基于顺序贝叶斯滤波,特别是在曼哈顿世界假设下,解决了旋转引起的非线性问题,实现了线性的SLAM公式。与传统方法相比,该算法在不进行昂贵的非线性优化的情况下,仍能获得与最先进的SLAM系统相当的性能。"
1. 线性SLAM方法
线性SLAM方法是SLAM(Simultaneous Localization and Mapping,同时定位与建图)的一种简化形式,它通过将问题线性化来降低计算复杂度和提高算法的稳定性和效率。传统的非线性SLAM方法通常在姿态图优化中估算相机姿态和地标,但这种方法在高维度空间中可能无法找到全局最优解。本文提出的线性SLAM方法则在线性卡尔曼滤波器框架内进行,确保了估计过程的可扩展性和效率。
2. 曼哈顿世界(MW)
曼哈顿世界是一种几何假设,用于描述具有大量垂直和水平平面的环境,如城市街道或室内空间。在这种环境中,物体主要沿着x、y轴方向排列,而较少沿z轴变化。利用这种结构规则,算法可以更有效地处理旋转,将其转换为线性问题,从而简化SLAM的求解。
3. 贝叶斯滤波
贝叶斯滤波是一种统计方法,用于在接收到新数据时更新对系统状态的估计。在SLAM中,贝叶斯滤波被用来不断更新对相机位置和环境地图的估计。顺序贝叶斯滤波(如卡尔曼滤波)是其中一种广泛应用的方法,它在每个时间步长中,通过预测和更新阶段来融合新的观测信息和先验知识。
4. 平面特征
在无纹理或低纹理环境中,平面特征成为重要的视觉线索。SLAM算法如L-SLAM利用这些平面(如墙壁和地板)来辅助定位和建图,提供额外的几何约束,增强算法的鲁棒性和准确性。
5. RGB-D数据
RGB-D数据结合了彩色图像(RGB)和深度信息(D),为SLAM提供了三维空间的感知能力。通过深度信息,算法可以直接获取场景的距离信息,这对于识别和跟踪平面特别有用。
6. 性能评估
L-SLAM在标准RGB-D基准和大型室内环境中进行了测试,证明了其在无需非线性优化的情况下,可以达到与其他先进SLAM方法相当的性能,这降低了计算成本并提高了实时性。
这篇论文提出了一种新的线性SLAM策略,它特别适用于平面丰富的环境,并且利用了曼哈顿世界的几何规则,通过线性卡尔曼滤波器实现高效的定位和建图。这一方法在降低计算复杂性的同时,保持了良好的定位精度,为实际应用提供了更优的解决方案。
4
Pyojin Kim、Brian Coltin和H.宽镇
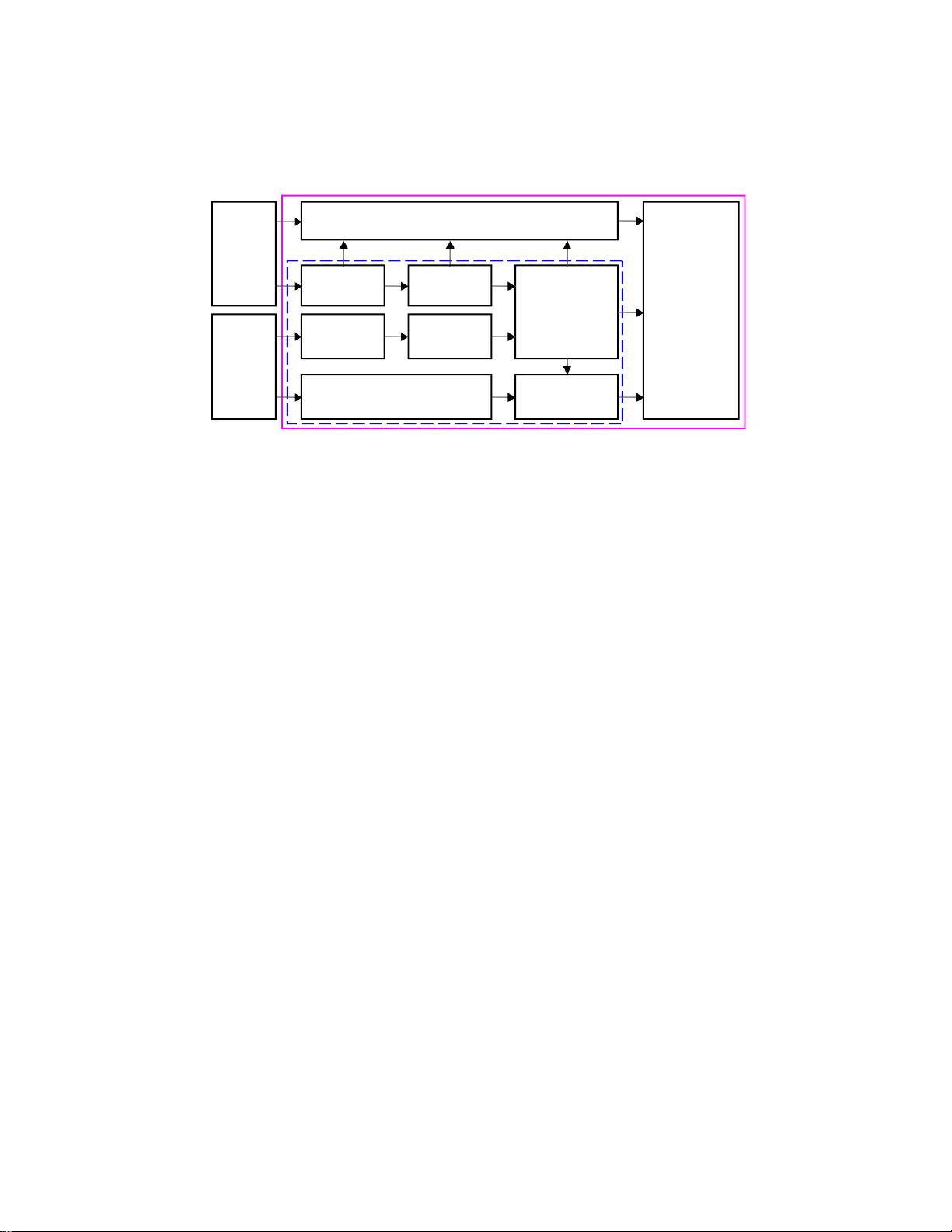
L-SLAM
LPVO
无漂移旋
转跟踪
翻译估算
RGB
深度
点检测跟踪
消失的方向
线检测
表面法
线
点云
线性
SLAM
卡尔曼
滤波器
正交平面检测跟踪
图二、 完整
L-SLAM
算法的概述。
仅在CPU上实现实时操作。尽管这些方法在结构化环境中展示了优越
的估计结果,但是它们需要昂贵且困难的姿态图优化,因为它们一起
估计相机旋转和平移[4]。
与所提出的L-SLAM最相关的平面SLAM方法是[20],其首先通过识
别分段平面模型来估计3-DoF相机旋转,并利用图形SLAM优化来恢复
2-DoF相机平移。然而,与估计全6-DoF相机运动的所提出的L-SLAM
不同,存在相机的平移运动总是平面的假设。
3
该方法
我们提出的L-SLAM 方法建立在先前的
基于线和平面的视觉里程计
(LPVO)算法上[18]。然而,虽然LPVO不能避免漂移随着时间的推
移,由于VO的性质,我们将其扩展到SLAM配方中的平面特征直接建
模为地标,以进一步约束相机运动,并显着减少平移漂移。
我们首先简要介绍一下前面的LPVO算法。3.1.作为第一个贡献,
我们提出了一种方法,在结构化环境中检测正交平面。3.2,这在我
们的SLAM方法中起着重要的作用。接下来,我们介绍了L-SLAM,一
种新的SLAM方法,使用正交平面特征的线性卡尔曼滤波器(KF)的
框架内,在第二节。3.3.图2示出了L-SLAM的概览。
3.1
基于直线和平面的视觉里程计
我们简要总结了LPVO算法(有关完整细节,请参阅[18])。LPVO有
两个主要步骤:1)跟踪结构规则性(曼哈顿框架)以
剩余15页未读,继续阅读
2022-08-04 上传
2021-05-15 上传
2022-08-04 上传
2022-07-06 上传
2019-09-30 上传
2020-06-16 上传
2023-03-30 上传
2024-03-11 上传
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- fgwas:功能基因组学和全基因组关联研究
- scratch-os:为学习目的而开发的轻巧且最小的操作系统
- InternshipSD:帕波佩
- 小黄鸡眼睛转动flash动画
- markdown
- 在我的房间里
- awesome-qt:精选的Qt相关库,工具等精选清单
- saas:学生即服务后端API
- Softmarketing-crx插件
- Forest-Kitchen:网上商城
- NaOpGenMo-2015:国家歌剧一代月,2015年版
- micromall:一个小商城
- actix:Rust的Actor框架
- 极速文章系统 Articles v1.0 For ASP.net
- 小笔记
- ForumFairy:在Laravel上构建的开源论坛平台
