无传感器PMSM控制的动态性能与稳定性研究:从静止启动到加速过程
146 浏览量
更新于2024-06-17
收藏 4.48MB PDF 举报
该研究论文探讨了"无速度传感器控制下的永磁同步电动机动态性能及稳定性",发表在《电气系统与信息技术学报》第三期(2016)181页,由奥萨马·M.Ghada、AbuEl-Sebah和AhmedAly Mansour等人合作完成。他们关注的是在降低成本和提高驱动系统可靠性方面具有吸引力的无位置传感器技术,特别是基于Luenberger观察器的应用。
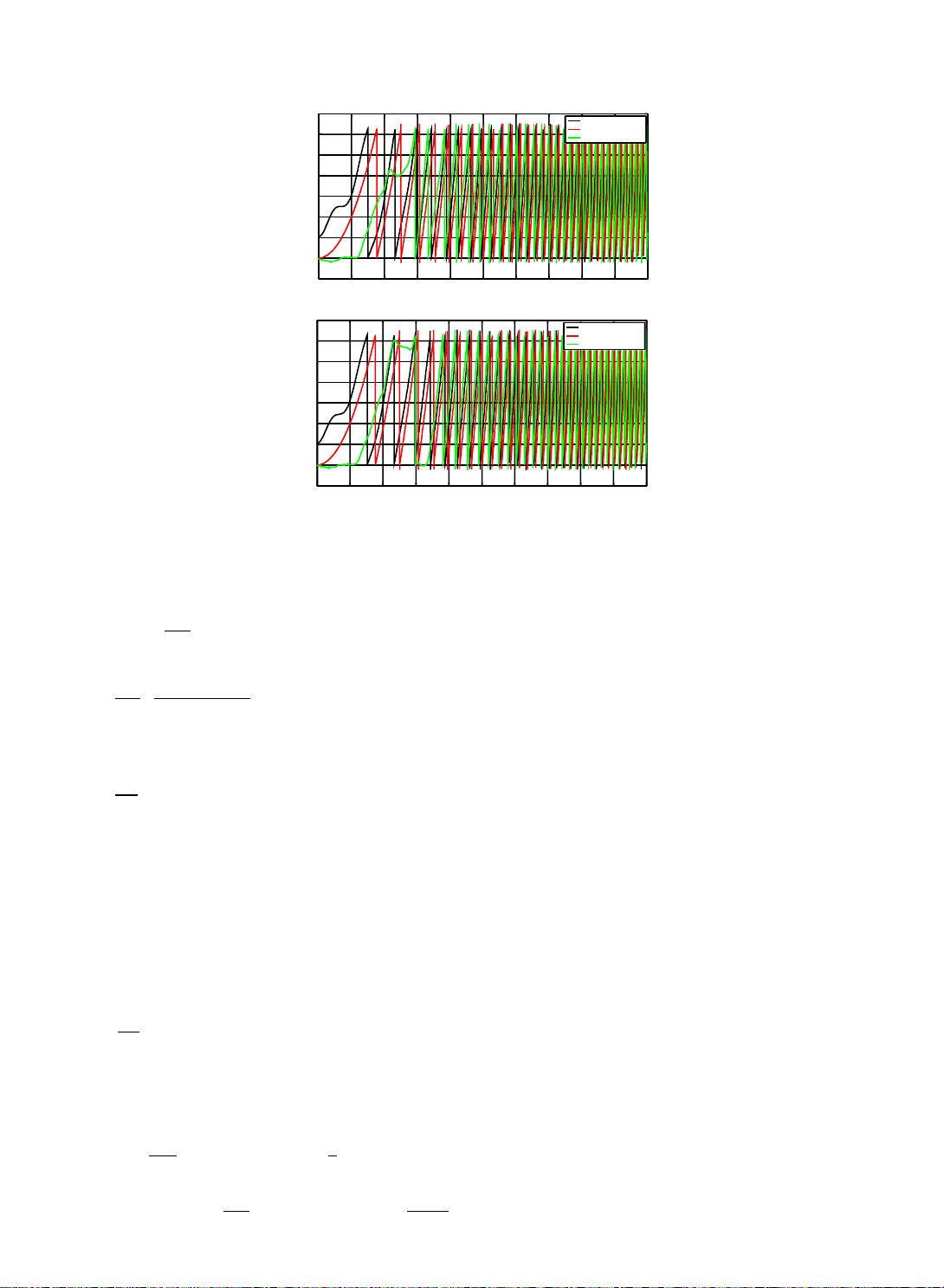
研究的焦点集中在解决PMSM(永磁同步电机)的初始位置未知和静止状态下启动的问题,这是传统控制系统中的挑战。作者特别提到了两种负载条件:风扇型负载和滚筒型负载,分别在归航和开环加速电流控制下,考察了从基本的开环加速度控制过渡到无传感器运行的动态过程,以及无传感器控制在面对负载扰动时的稳定性。
论文强调了永磁同步电机的优势,如良好的转矩-速度特性、高效率等,但传统的直接速度/位置传感器的使用限制了驱动系统的可靠性和紧凑性。因此,研究者引入了Luenberger自适应观测器来间接测量电机的状态,减少了对外部传感器的依赖。
为了实现这一目标,他们利用了DSPACEDS1104控制器进行无速度传感器矢量控制。通过仿真和实验验证,研究人员展示了无传感器控制在实际运行中的性能,证明了其在不同负载条件下的可行性,同时也探讨了可能的优化策略和稳定性改进措施。
此外,论文还包含了关于版权和许可的信息,指出这是由电子研究所(ERI)发布的开放获取文章,遵循CC BY-NC-ND 4.0许可协议,允许在特定条件下分享和使用。这篇研究对于那些寻求提高PMSM驱动器效率、降低成本并增强鲁棒性的工程师和技术人员来说,提供了有价值的技术参考。
186
O.M. Arafa
等人
/
电气系统与信息技术学报
3
(
2016
)
181
D
t
⎥ ⎢
⎥
⎦
D
t
J
−
Pω
⎣
0
1
L
s
−
Pω
r
L
s
01
7
6
5
4
3
2
1
0
-1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
时间秒
1)
K.ω
2
载荷
7
6
5
4
3
2
1
0
-1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
时间秒
2)
K.ω载荷
(b) 转子位置曲线-初始位置π/3
图五. (
续
)
机械子系统的方程如下
:
T
e
=
J
dt
+
Fω
r
+
T
L
(
5
)
dω
r
=
[T
e
−Fω
r
−T
L
]
(六)
状态空间导数形式的转子位置θ
r
为:
dθ
r
dt
=P
·
ω
r
(7
)
从Eq. (1)通过Eq。(7)永磁同步电动机动态模型可以用来模拟永磁同步电动机的瞬态运行。
3.
Luenberger观测器及其自适应机制
如果我们定义状态向量为X=[i
d
i
q
]
T
,输入向量为V=[V
d
V
q
λ]
T
,输出向量Y=[i
d
i
q
]
T
,则可以获得电机的以下
状态空间表示:
d X
=
A.X
+
B.U
,
Y
=
C.X
(
8
)
其中:
−
R
Pω
r
0
0
1
A
=
0
L
s
L
s
1 0
,
B
=
,
C
=
转子实际位置开环位
置观测器位置
转子实际位置开环位
置
发球位置
Ob
转子选择。
POS.
实际
/
开环
/
观测器
.rad
转子选择。
POS.
实际
/
开环
/
观测器
.rad
⎦
R
−
R
L
s
剩余28页未读,继续阅读
2023-09-01 上传
2023-06-19 上传
2023-07-12 上传
2023-03-29 上传
2023-05-02 上传
2023-07-08 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
