ARM嵌入式控制器驱动的混合试验控制系统设计与优化
版权申诉
16 浏览量
更新于2024-06-19
收藏 6.12MB PDF 举报
本文主要探讨了基于ARM架构的实时混合试验控制系统的研究,针对当前国内实验室在该领域的技术瓶颈和挑战,作者以STM32F407 ARM控制器为核心,结合OpenSees数值仿真软件和Matlab作为关键工具,以及LabVIEW平台的运用,旨在提升混合试验系统的自主性和实用性。
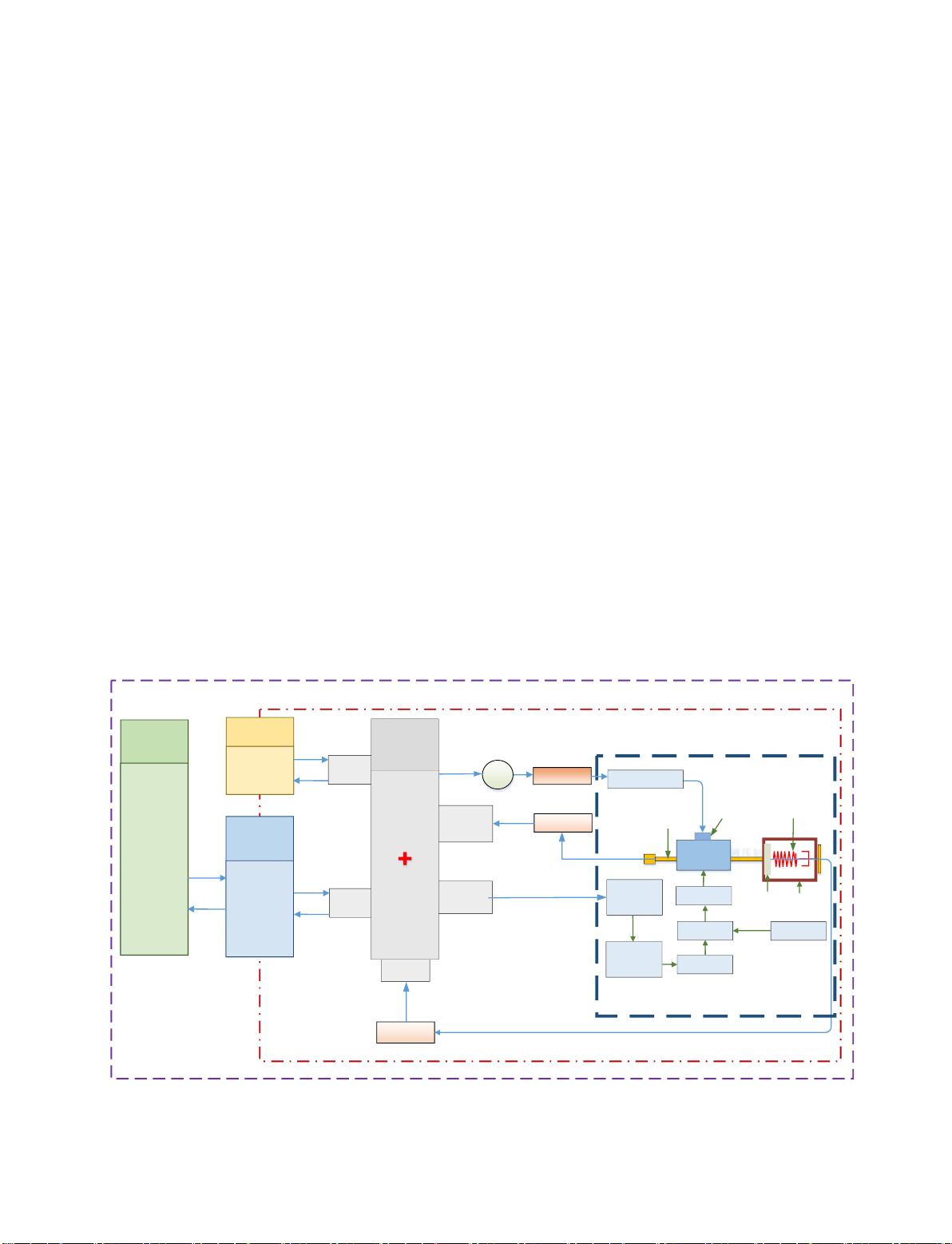
论文首先阐述了实时混合试验系统的整体设计,强调了其通过试验子结构和数值子结构相结合的方式,实现了物理加载与数值模拟的协同工作,能够经济高效地模拟结构在地震等极端条件下的动态响应。混合试验系统的核心控制器,即STM32F407,通过与OpenSees软件的交互,以及Matlab作为数据处理和通信中介,实现了硬件与软件的有效集成。
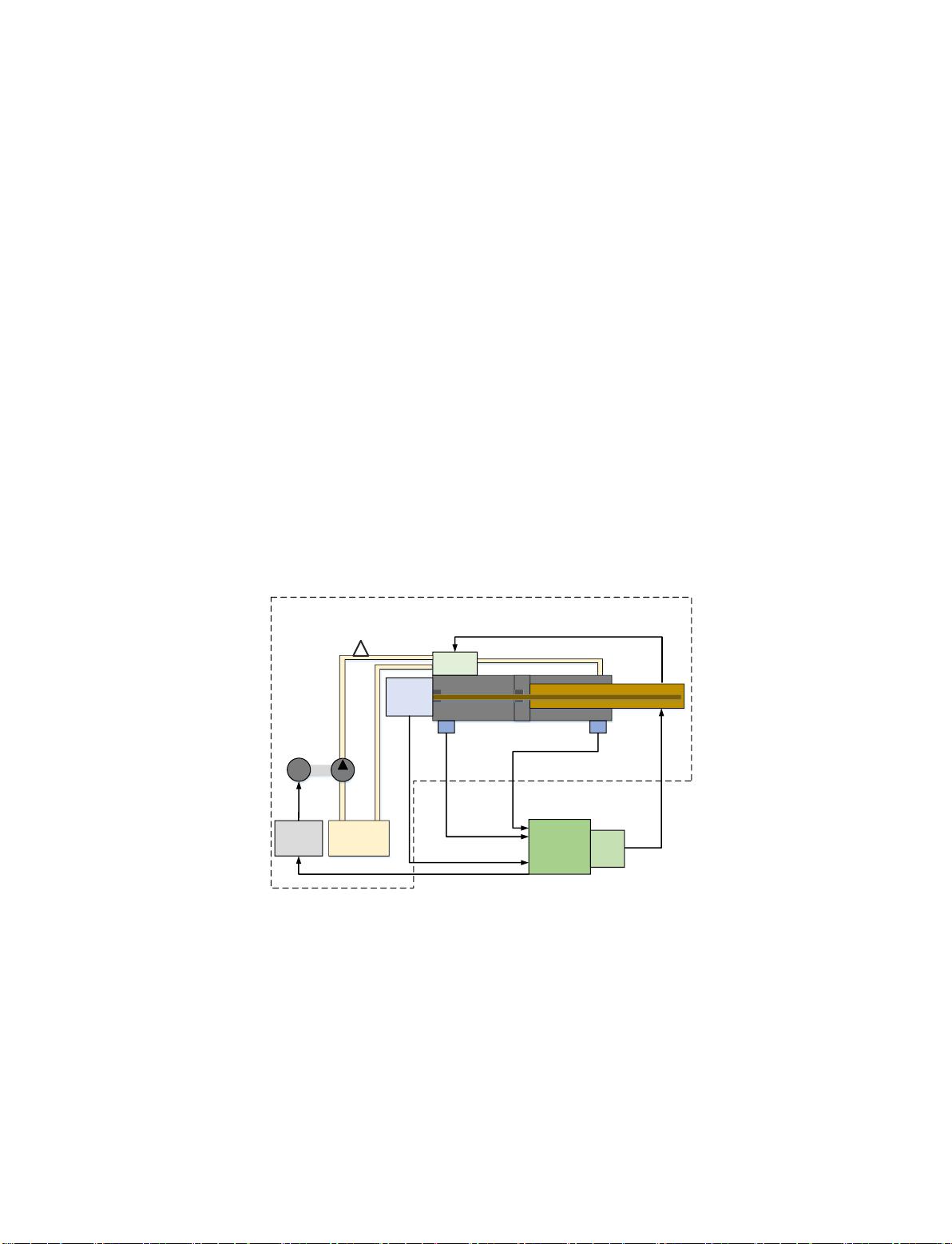
在系统的关键部分——液压伺服控制系统中,论文针对存在的响应速度慢、精度低和抗干扰能力弱的问题,提出了一种卡尔曼优化遗传PID控制算法。通过对液压伺服系统的非线性数学模型建立,通过遗传算法寻优,解决了PID控制器增益的设置问题,确保了阀控液压缸排量的精确控制。为了进一步提升控制性能,引入卡尔曼滤波算法,有效减小了幅度波动和外部干扰对系统的影响,从而提高了系统的稳定性和响应速度。
此外,论文还专门研发了一个基于LabVIEW的副控制器,用于伺服油源的间接控制,研究了两者之间高效而可靠的通信机制。这不仅提高了系统的灵活性,也为实际操作提供了便利。通过一系列实验验证,加装了线性弹簧的框架结构在该混合试验控制系统的驱动下,显示出了良好的动态性能。
这篇毕业论文深入研究了基于ARM的实时混合试验控制系统的各个方面,包括硬件选型、软件设计以及控制算法优化,对于推动我国实验室在该领域的自主研发和技术进步具有重要的参考价值。

9
进,将 PID 与云模型算法相结合,提高磁流变液制动器比例积分微分控制器的响应性能
[69]
。2018 年,Shutnan 和 Abdalla 针对机器人机械手的路径跟踪问题,采用克隆选择算法
整定 PID 和 FOPID 参数
[70]
;Bingul 等人使用杜鹃搜索算法优化 AVR 系统中 PID 控制器参
数的设计
[71]
;高晓宇等人提出了一种人工鱼群算法,该算法对运动伺服控制系统的 PID
具有良好的优化效果
[72]
;刘慧等人提出了一种基于迭代学习控制的 PID 参数智能调整方
法,使 AFM 的 PID 参数能够根据样品的形状自动调整
[73]
。2020 年,侯远欣等人将 BP 神
经网络与 PID 相结合,使用梯度下降法修正加权值,实现对 PID 参数的调节,提高了液
压驱动型船舶升沉补偿的精度
[74]
;Loucif 使用鲸鱼优化算法来进行 PID 最优参数的确定,
以实现机器人操作员的更好轨迹跟踪
[75]
;邓传远等人发现卡尔曼滤波和 PID 控制器的结
合可以提高惯性导航系统的位置精度,减少累积积分误差和噪声误差对导航系统的破坏性
影响
[76]
。2021 年昊峰等人采用粒子群优化(PSO)算法优化 PID 参数,并从惯性权重、
学习系数以及精英变异三个方面对粒子群算法进行改进,实现了电液位置伺服系统轨迹跟
踪精度的提高
[77]
;同年范子彦等人采用模糊算法与 RBF 神经网络结合在线调整 PID 参
数,稳定了阀控液压马达的输出转速,提高了油茶果采摘的效率
[78]
。2022 年何旺提出了
一种改进的人工蜂群算法(EABC)来优化 PID 控制器的增益,提高了带钢偏差控制系统的
控制性能
[79]
。
根据以上国内外现状可以看出,实时混合试验在各研究方向都已开展相关研究并取得
很多研究成果,然而目前实时混合试验平台的研发多以 OpenFresco 软件平台为基础,平
台门槛较高,且只能与国外的 MTS 系列等特定控制系统进行通信,并且基于 PID 改进算
法和伺服控制系统模型构建的应用没有针对实时混合试验系统的实际研究,混合试验系统
核心控制技术难以突破。因此,国内实时混合试验系统的研究需要一套平台门槛低、通讯
接口不受较多限制、系统精确度高且适用范围广的实时混合试验控制系统。
1.4 主要研究内容
本课题来源于国家重点研发计划(政府间国际科技创新合作)项目,面向高耗散粘弹
性材料及震损结构减震增强技术研究(2019YFE0121900)。
混合试验系统结合了试验子结构与数值子结构
[80-81]
,是进行结构抗震性能研究的有效
手段。本文提出了一种基于 ARM 的混合试验系统。该系统以 ARM 为内核的 STM32F407
单片机作为系统控制器,依靠 OpenSees 进行结构的数值模拟,并采用 Matlab 软件建立


剩余95页未读,继续阅读
2009-08-10 上传
822 浏览量
点击了解资源详情


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
