VOLDOR:基于光流恢复的视觉里程计方法
198 浏览量
更新于2024-06-20
收藏 2.68MB PDF 举报
"本文介绍了一种名为VOLDOR (Visual Odometry with Log-logistic Dense Optical Flow Recovery) 的新型视觉里程计方法,该方法利用密集光流恢复技术来提高定位精度。VOLDOR采用概率模型来定义问题,并通过广义期望最大化(EM)公式进行相机运动、像素深度和运动轨迹置信度的联合推断。与传统假设高斯分布误差的方法不同,VOLDOR使用对数逻辑残差模型,能够适应各种先进的光流估计方法,使其具有模块化和光流估计选择的不确定性。这种方法在TUMRGB-D和KITTI odometry benchmarks上表现出色,且其开源实现是GPU优化的,具有线性计算和存储增长。"
1. VOLDOR方法概述
VOLDOR是一种密集的视觉里程计技术,它不再依赖于手动提取的关键点对应,而是输入外部估计的光流场。这种方法通过概率模型来解决VO问题,模型中光流场被视为观测变量,受到Fisk分布的测量误差影响。同时,相机姿态、深度图和刚度图作为隐变量被建模。
2. 与传统方法的对比
传统的间接VO方法基于稀疏关键点的几何分析,而直接方法则尝试联合优化图像间的密集匹配和相机运动。尽管两者都有成功的应用,但它们都面临挑战,如运动模糊、深度遮挡和视角变化导致的特征定位误差。VOLDOR通过更准确地建模这些误差来改进这一情况。
3. 模型与误差建模
VOLDOR使用对数逻辑残差模型替代传统的高斯分布假设,这使得模型能更好地适应不同条件下的光流估计,增强了对运动模糊、深度遮挡和外观变化的鲁棒性。
4. 性能与应用
在TUMRGB-D和KITTI odometry基准测试中,VOLDOR展现出优越的性能,证明了其在增强现实、机器人导航和自动驾驶等领域的潜力。开源实现表明,该方法在GPU上运行高效,计算和存储需求具有线性增长特性,易于实际部署。
5. 光流估计的进展与VOLDOR的结合
最近在监督学习的光流估计方面的进步尚未充分应用于姿态估计任务。VOLDOR通过利用这些发展,将光流估计的精度优势引入到VO中,有望进一步提升定位性能。
VOLDOR是一种创新的视觉里程计解决方案,通过概率模型和对数逻辑残差模型处理光流误差,提高了在复杂环境下的定位准确性,为实际应用提供了强大工具。
4901
=X
t
−
1
()
2
不
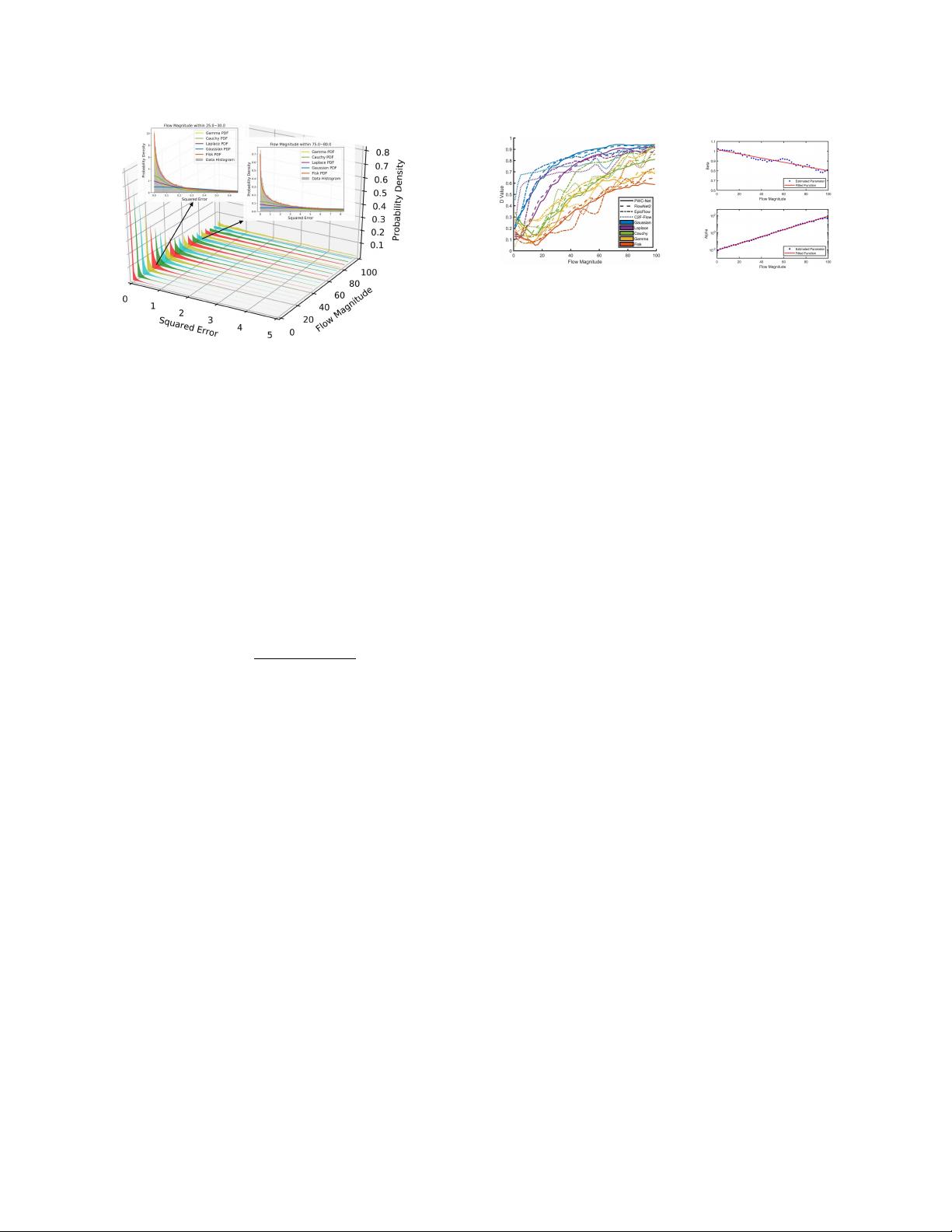
图3:经验残差分布。KITTI [ 25 ]和Sintel [ 7 ]数据集的整个
地面实况数据上
PWC-Net
输出的光流
EPE
残差超过流量幅
度。
图4(a),我们将K-S检验结果[3]量化我们的经验分
布 和 参 考 分 析 分 布 之 间 的 CDF 的 上 确 界 距 离 ( D
值)。
(a)
K-S检验(b)α、β
图
4
:
适应度量化和模型参数化。
(a)
四种光流法和五种分布的
KS
检验结果
[3](b)
分别使用对数
线性和线性回归,根据KITTI经验数据估算α
、
β
,
如方程式
所述。(6)、(7)。
5.
推理
在本节中,我们将介绍我们的迭代推理框架,该框
架交替优化深度图、相机
因此,给定
v
ob
π
θ
j
t
,我们模拟概率
姿势和刚度贴图。
的
v
r
i
g
=
t
(
θ
j
),匹配底层的地面实况,如
ρ
(v
rig
<
$
v
ob
)=
F
(v
rig
−
v
ob
<$2
;
A
(v
ob
)
,
B
(
v
ob
))
,
(
4
)
其中
Fisk
分布
F
的
PDF
的函数形式由下式给出:
(
β/α
)(
x/α
)
β
−
1
5.1.
深度和刚度更新
广义期望最大化(GEM)。 我们推断深度θ及其随
时间的刚度W,同时假设固定的已知相机姿态T。我
们估计了真实的位置-
前P(X
| θ
,
W
;
T)通过GEM框架[73]。在
在本节中,我们将表示Eq。(2)如P(X| θ
,
W),其
中
F
(
x
;
α
,
β
)
=
(1 +(
x/α
)
β
)
2
(
5)
固定的T被省略。 我们近似于难以处理的真实
后
P
(
θ
,
W
|
X
)
具有分布的受限
Q
族
Q
,
从图4(b)中,我们进一步确定了
菲斯克分销。由于图中显示了清晰的线性对应关系,
因此我们不使用查找表,而是应用拟合函数来查找参
数,如
A
(v
ob
)=
a
1
e
a
2
<$v
ob
<
$2
(
6
)
其中
,
a1
、
a2
和
b1
、
b2
是取决于光流估
计方法的学习参数
接下来,我们对异常值
li k k
函数
μ
(
·
)进行建
模
。
一般
的
方法[53,99]是用统一的
分布以提高鲁棒性。在我们的工作中,对于uti-
假设
q
(
θ
,
W
)
,其中
q
(
θ
,
W
)
=
j
q
(
θ
j
)
t
q
(
W
t
)
. F
或
可
拓性
y
,
q
(
θ
j
)
进 一 步
被约束到
Kronec kerδ
函数族
q
(
θ
j
)
=
δ
(
θ
j
=
θ
j
)
,其中
θ
j
是待估计的参数。更进一步,
q
(
Wt
)
继承了
定义
在刚性映射
Wt
上的光滑性,
当量(11),文[73]证明了它是最小化变分分布与真
后验之间的KL散度。在M步骤中,我们试图根据W j
上的估计PDF来估计θ j g i的最佳值
。
NE XT
,我们描
述了
我们的选择用于此任务的估计。
最大似然估计(MLE)。对于我们的问题,MLE的
标准定义如下:
对观测流给出的先验进行限制,我们进一步让
J
j
π
t
−
1
(
θ
j
)
j
吉
吉
均匀分布的密度是
观测流向量
上的函数
μ
(
·
)
θ
MLE
=argmax
θ
j
t
q
(
W
t
)log
P
(
X
t
|
θ
=
θ
,
W
t
)
(
9
)
其中
q
(
W
j
)
是由下式给出的估计分布密度:
µ
(
v
ob
)
=
F
(
λ
v
ob
2
;
A
(
v
ob
)
,
B
(v
ob
)
(
8
)
其中λ是调整密度的超参数,这也是选择内点的严格性。
λ的数值解释是光流百分比EPE,
剩余15页未读,继续阅读
2021-05-18 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-06 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- EMS:考试管理系统
- Python库 | python-gyazo-0.4.0.tar.gz
- tools_nuvot_8.6emv_x1_x2_emvtools
- SwiftFayeClient:一个用于Faye发布订阅推送服务器的可怕的单文件swift客户端
- dartling_todo_mvc_spirals:从 darling_todos 开发,用于教学目的
- lane:Golang的队列,堆栈和双端队列实现库
- 2x3-sea-battle-websocket-server:海战用websocket服务器
- nanopm:NanoPM,仅单头PatchMatch
- Excel模板教师节次课表.zip
- cognitive-systems-for-health-technology:卫生技术认知系统(TX00DG16)
- newsmlvalidator:NewsML-G2 + XHTML + 微数据 + NITF 验证器
- -mithril.js
- PHP整站程序8套-4.zip
- segment1_神经网络图像_神经网络图像_matlab_图像提取
- my-portfolio:该存储库包含我的投资组合的源代码以及访问URL
- ErabliereApi:API倾销和集中管理者的信息,请访问dans desérablières
