MATLAB实现惯导系统:数据分析与三维运动模拟
需积分: 22 57 浏览量
更新于2024-09-02
1
收藏 138KB DOCX 举报
"惯导系统为指北方位的平台系统,该系统基于初始地理位置和姿态角,通过处理比力信息f(加速度)和陀螺仪角速率信息w,进行导航计算。作业涉及经纬度、速度向量分解、加速度分解、高度保持以及MATLAB编程实践。数据包括600秒的东、北、天向信息,采样周期为0.01秒。在分析过程中,观察到经纬度和速度变化的周期性,同时确认Vz速度的稳定表示飞行高度不变。程序中使用循环和角度转换对数据进行处理,以实现导航计算。"
惯性导航是一种自主式导航技术,它不依赖外部信号,而是依赖于内部传感器——加速度计和陀螺仪来连续监测和计算物体的运动状态。在这个特定的作业中,惯导系统被设定为指北方位,意味着平台的坐标轴与地理坐标系对齐,使得计算更直观和简化。
初始位置设定在经度116.344762072818度,纬度39.981430918136度,高度40.8236米,初始姿态角为[0 0 0]度,意味着平台处于水平状态,没有俯仰、横滚或航向偏移。初始速度为0米/秒,表明系统处于静止状态,但需要跟踪和计算动态变化。
加速度和角速率数据是通过加速度计和陀螺仪测量得到的,分别表示东、北、天三个方向的加速度和角速度。这些数据用于推算物体的运动状态,包括速度、位置和姿态。在MATLAB程序中,数据被分解为对应的方向分量,并根据地球模型(考虑地球曲率和引力)进行修正,以获取精确的位置和速度信息。
速度矢量分解和加速度分解是导航计算的关键步骤。在地球坐标系中,加速度分解为沿纬度、经度和垂直方向的分量,而速度的更新则基于这些加速度分量和当前速度。通过不断的迭代和积分,可以追踪物体的动态轨迹。
在处理数据时,注意了地球的引力场模型,如重力加速度g随纬度变化的修正,以及地球半径在不同纬度的差异,这些因素影响了速度和位置的计算。MATLAB程序中的循环结构用于处理每一帧数据,角度转换则确保角度数据符合算法的预期。
通过对经纬度变化曲线、东向和北向速度曲线的分析,可以发现系统的周期性行为,这可能源于飞行器的特定运动模式或者数据采集的特性。Vz速度的波动范围在-1.5到1.5米/秒之间,显示飞行高度基本保持不变,验证了无须计算高度通道的假设。
总结来说,这个惯导作业提供了一个实际应用的案例,加深了对惯性导航系统工作原理的理解,包括数据处理、运动方程的运用以及MATLAB编程技巧。通过这样的实践,可以提升对导航系统设计和数据分析的能力。
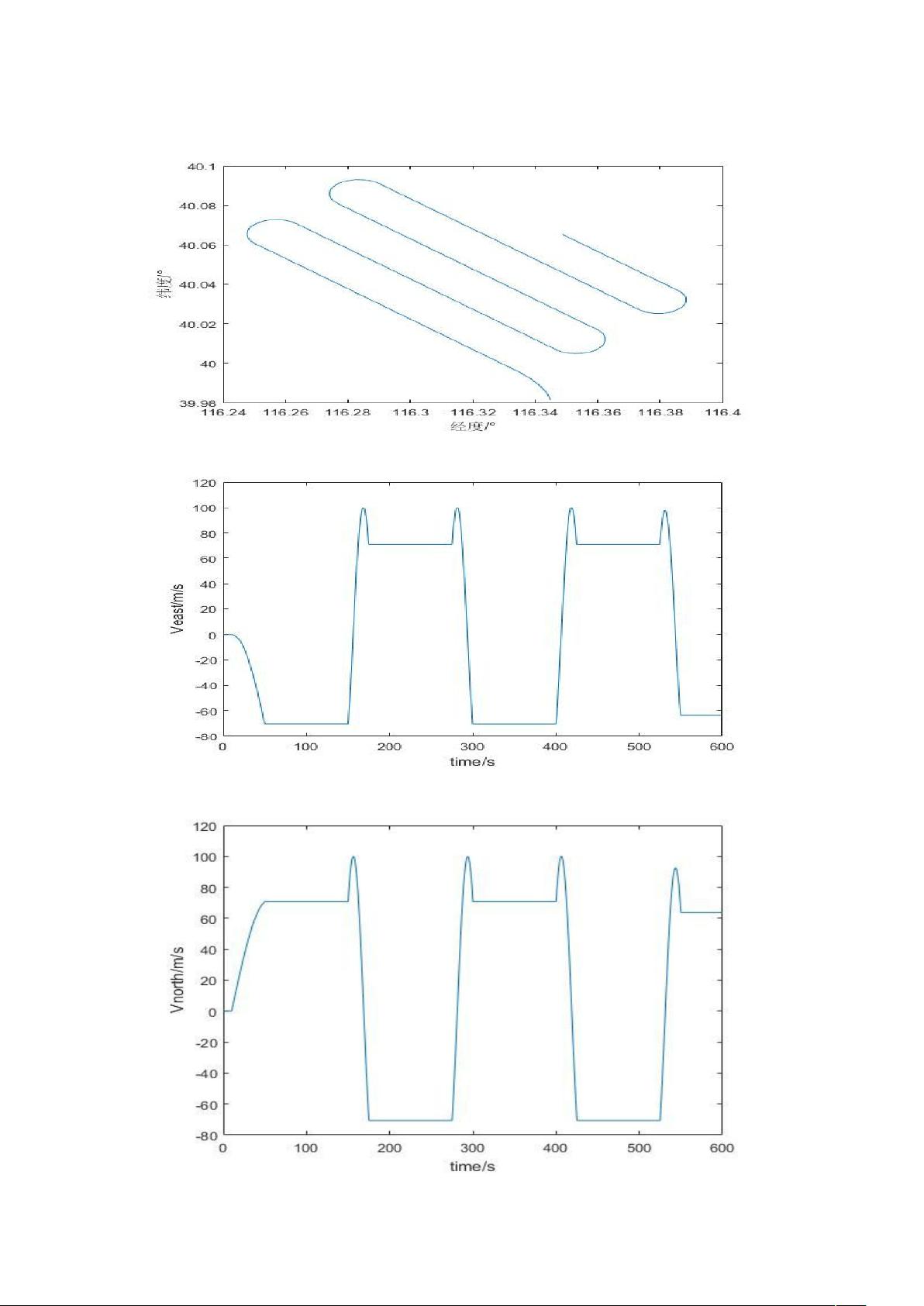
经纬度曲线图:
东向速度变化图:
北向速度变化图
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-16 上传
2020-02-27 上传
2018-02-26 上传
2021-10-02 上传
点击了解资源详情
点击了解资源详情

噼里啪啦滴滴嗒嗒
- 粉丝: 25
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
