基于IMU的步态分析关节角度测量
需积分: 5 143 浏览量
更新于2024-07-16
收藏 2.71MB PDF 举报
"这篇论文‘sensors-14-06891 (6).pdf’探讨了基于惯性测量单元(IMU)的关节角度测量在步态分析中的应用。"
文章详细介绍了如何利用IMU(惯性测量单元)来计算人体运动过程中的关节角度,特别是在没有固定参照面和直角的情况下,因为与大多数机器人装置不同,人体不具备这些特征。研究者Thomas Seel、Jörg Raisch和Thomas Schauer来自德国柏林工业大学的控制系统组和马克斯普朗克复杂技术系统动力学研究所。
在步态分析中,精确的关节角度测量对于理解行走或跑步等运动模式至关重要。传统的步态分析通常依赖于光学跟踪系统,但这些系统可能受到视线遮挡和环境限制的影响。而IMU则提供了一种便携式、无线的解决方案,能够在各种环境中实时监测关节运动。
论文首先讨论了IMU的工作原理,它能通过检测加速度和陀螺仪数据来测量物体的线性和旋转运动。然后,作者们详细阐述了如何处理和融合来自多个IMU的数据,以克服单个传感器的局限性和误差,如漂移和噪声。他们提出了一个算法框架,该框架考虑了人体关节的生物力学特性,并且不依赖于特定的传感器安装方向。
接下来,论文详细介绍了实验设计和数据分析方法,包括数据采集、预处理、校准以及关节角度的计算。实验部分可能涉及受试者在行走或跑步时佩戴IMU,然后通过信号处理技术提取关节运动参数。
为了验证所提出方法的有效性,研究可能对比了IMU测量结果与传统的光学跟踪系统或临床评估的结果。此外,他们可能还分析了不同行走条件(如正常行走、改变步态速度或有障碍行走)下的关节角度变化,以展示其在不同场景下的适用性。
这篇论文为基于IMU的关节角度测量提供了深入的理论和实践经验,对运动生物力学、康复医学和运动科学等领域具有重要价值。通过这种方法,可以更准确地监测和分析人类的步态,有助于理解运动疾病、损伤恢复和运动性能优化等问题。
Sensors 2014, 14 6894
measured during that time interval to determine the local coordinates of the segment’s longitudinal
axis. Additional sitting calibration postures are used in [13]. Besides static postures, predefined
calibration motions can be used to identify the coordinates of physically meaningful axes in the upper
and lower sensor coordinate system. Examples can be found in Figure 2 and in [14–16]. Moreover,
a combination of postures and motions might be used to identify the sensor-to-segment orientations,
as e.g., in the Outwalk protocol [17,18]. It employs pure flexion/extension motions and static poses
to find the local coordinates of joint-related axes. Finally, the protocol used in [19] solves a closed
kinematic chain to refine joint axis and position coordinates that have been obtained from a combination
of calibration postures, predefined motion and manual measurements of body dimensions. However, it
is important to note that, both in calibration postures and calibration motions, the accuracy is limited by
the precision with which the subject can perform the postures or motions. Nevertheless, the mentioned
methods for joint axis identification make a major contribution to the quality of IMU-based joint angle
measurements. Therefore, most of the methods that are reviewed in Section 2 employ such techniques.
In Section 3.1.1, we will introduce a new method that, unlike previous approaches, identifies the local
joint axis coordinates from arbitrary motion data by exploiting kinematic constraints.
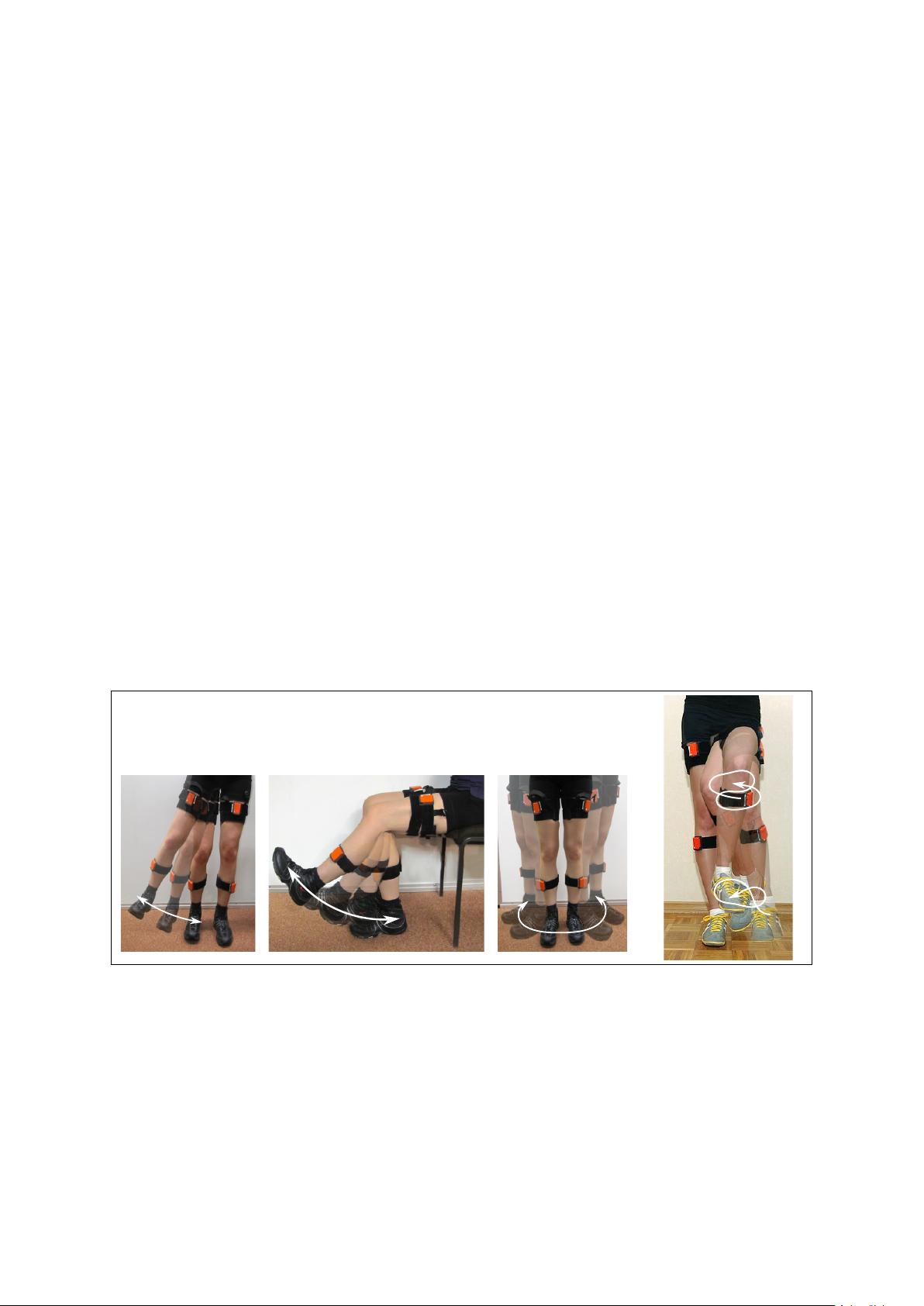
Figure 2. Examples for calibration motions that are used in the literature [14,15,17–19] to
determine the coordinates of physiologically meaningful axes, e.g., the knee joint axis, in
the local coordinate systems of the sensors. In such methods, the precision depends on how
accurately the subject performs the motion. In contrast, the present approach uses arbitrary
motions and identifies the sensor-to-segment mounting by exploiting kinematic constraints.
Sensor-to-segment calibration using: arbitrary motions →
. (see [20] for animations)
. precisely defined motions
. . ↓ &
Besides the need of knowing the joint axis, some joint angle algorithms require additional knowledge
of the joint position in local sensor coordinates; see, e.g., [9,21,22]. Furthermore, it has been
demonstrated by Young [23] that joint position vectors can be used to improve the accuracy of body
segment orientation estimates if the kinematic constraints of the joints are exploited. Vice versa,
kinematic constraints have been used by Roetenberg et al. to estimate the joint positions based on
accelerations and angular rates measured during motion, as briefly described in [21]. The method is
also mentioned as an optional part of the body segment orientation Kalman filter described in [22]. In
Section 3.1.3, we will propose a new method that exploits the same constraints, but uses a nonlinear least
squares technique.
剩余18页未读,继续阅读
2024-03-17 上传
2023-09-01 上传
2023-09-01 上传
2023-09-01 上传
2023-09-01 上传
2023-09-01 上传
2024-07-19 上传
2019-07-21 上传
2021-03-23 上传

weixin_43472049
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
