非线性多智能体系统分布式脉冲控制的领导者跟随共识
需积分: 10 195 浏览量
更新于2024-08-13
收藏 1.66MB PDF 举报
"这篇研究论文探讨了通过分布式脉冲控制实现非线性多智能体系统的网络领导者跟随一致性问题。文章考虑了网络诱导的延迟因素,并设计了一种在线算法来处理这些问题。"
在分布式系统和控制理论领域,多智能体系统(Multi-agent systems)是一个重要的研究方向,它涉及到多个自主实体(智能体)之间的协调与合作。这些智能体可以是机器人、传感器节点或其他具有决策能力的单元。在现实世界的应用中,如无人机编队、物联网设备协作等,多智能体系统的一致性是确保所有智能体协同工作并达到预定目标的关键。
本研究论文的核心议题是“基于网络的领导者跟随一致性”(Network-based leader-following consensus),这是多智能体系统中的一种经典一致性问题。在这个问题中,一个或多个“领导者”智能体确定了整个系统的运动方向,而其他“跟随者”智能体则试图通过相互间的通信和本地信息交换,调整自己的状态以匹配领导者的状态。网络诱导的延迟是此类系统中常见的挑战,因为智能体间的通信通常会受到网络拥堵、传输时延等因素的影响。
文章提出采用“分布式脉冲控制”(Distributed impulsive control)策略来解决这个问题。脉冲控制是一种间歇性的控制方法,它在特定时间点进行干预,而不是连续不断地施加控制力。这种策略可以有效降低计算复杂性,同时在有延迟的网络环境中保持系统的稳定性。
作者们在论文中首先考虑了网络诱导的延迟对系统性能的影响,然后设计了一个在线算法,该算法能够动态地调整每个智能体的控制输入,以克服这些延迟导致的问题。他们还可能分析了系统的一致性条件,比如利用Lyapunov稳定性理论来证明在脉冲控制下,即使存在网络延迟,系统也能最终达到领导者跟随的一致状态。
此外,论文可能还包括了仿真结果和实际案例,以验证所提出的控制策略在不同场景下的有效性。这些结果不仅有助于理论理解,也为实际应用提供了指导。
这篇研究论文对于理解和解决非线性多智能体系统中的一致性问题具有重要价值,特别是在面对网络延迟这一挑战时,提出的分布式脉冲控制策略有望成为解决这类问题的有效工具。
W. He et al. / Information Sciences 380 (2017) 145–158 147
where x
i
(t) ∈ R
n
denotes the state of the i th node, f (x
i
(t)) = ( f
1
(x
i
(t)) , f
2
(x
i
(t)) , . . . , f
n
( x
i
( t)))
T
is a nonlinear function, u
i
(t)
is the control input, and A and B are constant matrices.
The leader’s dynamics is expressed as
˙
s (t) = As (t) + Bf (s (t)) (2)
The objective is to design a distributed networked-based impulsive controller u
i
(t) with only sampled data of the agent
and its neighbors at discrete instants such that all agents (1) reach global exponential consensus under the guidance of the
leader (2) .
Definition 1. The multi-agent system (1) is said to achieve global exponential consensus with the leader s (t) if there exist
two positive constants θ and ε such that for any x
i
(t
0
) , s (t
0
) ∈ R
n
x
i
(t) − s (t) ≤ θ x
i
(t
0
) − s (t
0
) e
−ε(t−t
0
)
, i = 1 , 2 , . . . , N
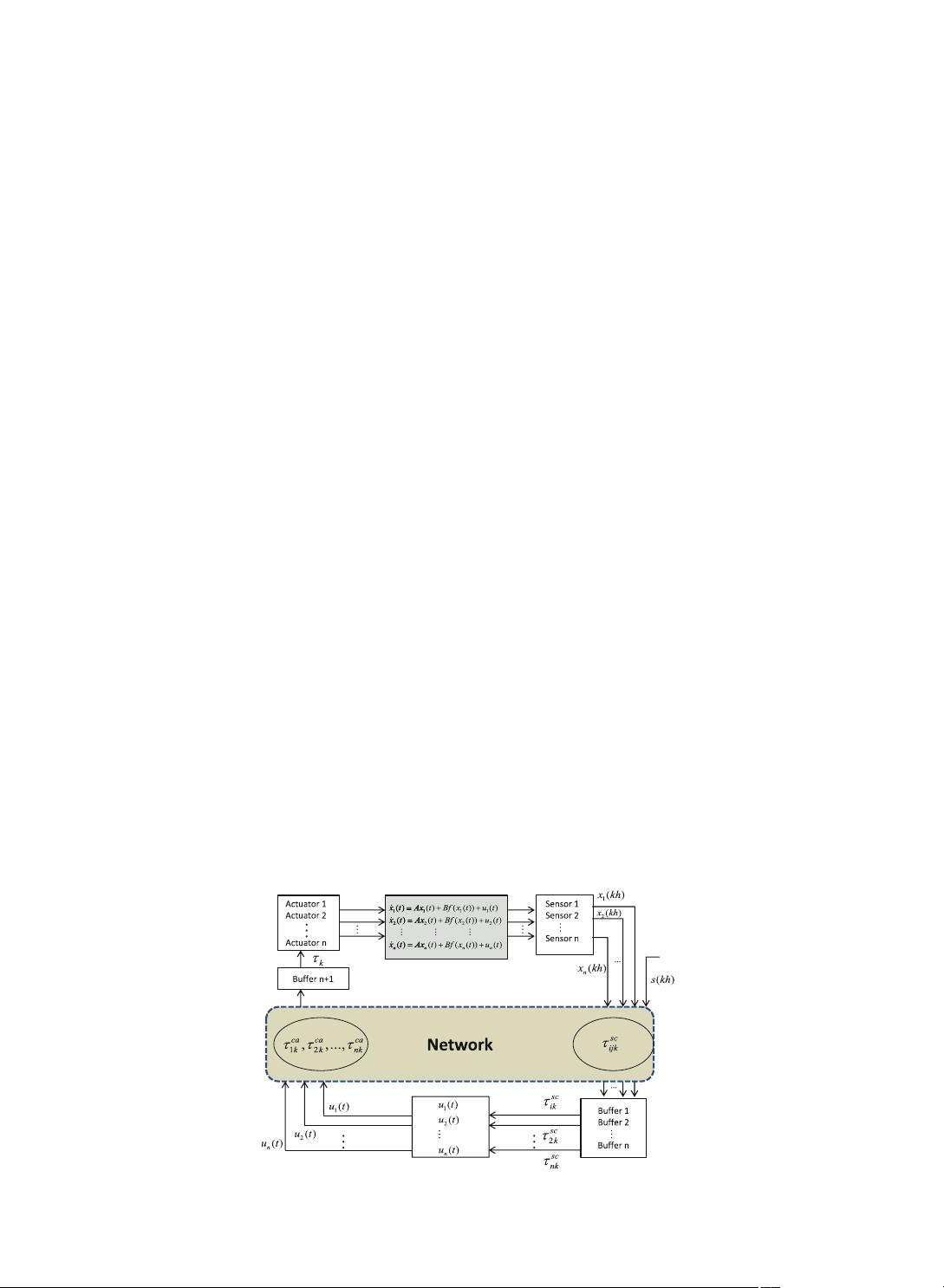
In this paper, a network-based control configuration is established, as shown in Fig. 1 , where sensor/actuator and an
impulsive controller of each agent are remotely distributed and connected via a communication network. It is assumed that
the sensor is clock-driven and both the controller and the buffers are event-driven. h is the sampling period. At t = t
0
+ kh ,
each agent’s information is sampled and transferred to its controller and other agents via a communication network. Buffer
i is used to store received information until all the data for the controller u
i
is collected. Let τ
sc
ijk
, i = 1 , . . . , N , j = 1 , . . . , N + 1
be the communication delay between the sensor j and Buffer i , where j = N + 1 denotes the sensor of the leader. Thus,
the time from the instant t
0
+ kh when sensor i samples data from agent i to the instant when the controller i is ready
is τ
sc
ik
= max { τ
sc
ijk
| i = 1 , . . . , N , j = 1 , . . . , N + 1 } . As the controller of each agent may arrive at the actuator at different time, a
common buffer n + 1 is employed to store all the controllers’ information to make all actuators operate at the same time.
Let τ
ca
ik
, i = 1 , . . . , N denote the delay from the controller i to Buffer n + 1 . Thus the total delay from the sensor to the actuator
for each agent can be defined as τ
k
= max { τ
sc
ik
+ τ
ca
ik
, i = 1 , . . . , N} . Then, a networked-based impulsive controller is designed
as
u
i
(t) =
∞
k =1
−c
N
j=1
l
ij
x
j
(t
0
+ kh ) − cd
i
(x
i
(t
0
+ kh ) − s (t
0
+ kh ))
δ(t − t
k
) (3)
where t
k
= t
0
+ kh + τ
k
, τ
min
= min
k
{ τ
k
| k ∈ N } , τ
max
= max
k
{ τ
k
| k ∈ N } , c is the coupling strength, and d
i
≥ 0 , i = 1 , 2 , . . . , N,
are pinning gains. Here, d
i
> 0 if and only if the i th node is informed by the leader. The node i is referred to as the pinned
node or controlled node, δ(·) is the Dirac impulse.
The design of a distributed networked-based impulsive controller u
i
(t) is related to the design of an impulse sequence
{ t
k
| k = 0 , 1 , . . . } and appropriate coupling strength c , pinning strategies d
i
, regarded as impulsive gains. As the impulse se-
quence t
k
= t
0
+ kh + τ
k
. Therefore, the design problem is turned to find appropriate sampling periods h , coupling strength
c and pinning strategies d
i
by taking transmittal delay τ
k
into account.
Define the error state e
i
(t) = x
i
(t) − s (t) . From (1)–(3) , we have the following error system:
⎧
⎪
⎨
⎪
⎩
˙
e
i
(t) = Ae
i
(t) + Bg (e
i
(t ) , s (t )) , t ∈ [ t
k −1
, t
k
)
e
i
(t
k
) − e
i
(t
−
k
) = −c
N
j=1
l
ij
e
j
( (t
k
− τ
k
)
−
) − cd
i
e
i
( (t
k
− τ
k
)
−
)
(4)
Fig. 1. Network-based control configuration for multi-agent system (1) .
剩余13页未读,继续阅读
346 浏览量
点击了解资源详情
点击了解资源详情
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

weixin_38638647
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
