A*寻路算法详解及实战应用
本文深入探讨了A*(A-Star)寻路算法,它是一种在网格环境中寻找两点之间最短路径的经典算法,特别是在游戏开发和路径规划中广泛应用。A*算法的核心思想是结合启发式函数来优化搜索过程,使得角色能够在避开障碍物的同时,尽可能地接近目标。
首先,我们明确了几个关键概念:
1. 节点(Node):每个网格单元都被视为一个节点,用于存储其位置(x, y坐标)以及与周围节点的关系。
2. 代价(Cost):衡量从一个节点移动到另一个节点的成本,通常包括实际距离(g值)和估计到达目标的距离(h值)。g值通常基于简单的曼哈顿距离(水平或垂直方向),而h值则可以根据启发式函数(如欧几里得距离或曼哈顿距离)来计算,总代价f值等于g值加上h值。
在Node类的实现中,除了基本的位置信息外,还包括:
- f、g、h值:分别表示总成本、实际成本和启发式估计。
- walkable属性:标识节点是否可以穿越,常用于标记障碍物。
- parent属性:记录当前节点的父节点,用于回溯路径。
- costMultiplier:可调整的代价因子,用于适应不同场景下的成本计算。
接下来,A*算法的工作流程包括:
- 开始时,将起点设置为开集(Open List),终点为关集(Closed List)。
- 检查开集中的节点,选择f值最小的节点作为当前节点。
- 更新当前节点的邻居节点,计算它们的f、g、h值,并判断是否可行走(walkable)。
- 如果找到终点,通过parent属性回溯路径;否则,将当前节点标记为已访问并加入关集,然后继续搜索。
- 当所有节点都检查过且没有找到终点时,意味着没有可达路径。
本文提供了具体的代码示例,使得初学者能够轻松理解和实践A*算法,这对于理解和实现游戏内的路径规划、AI角色行为等方面具有重要的指导意义。通过结合实际编程操作,读者能更好地掌握如何在实际项目中应用A*算法来优化寻路效率。
?
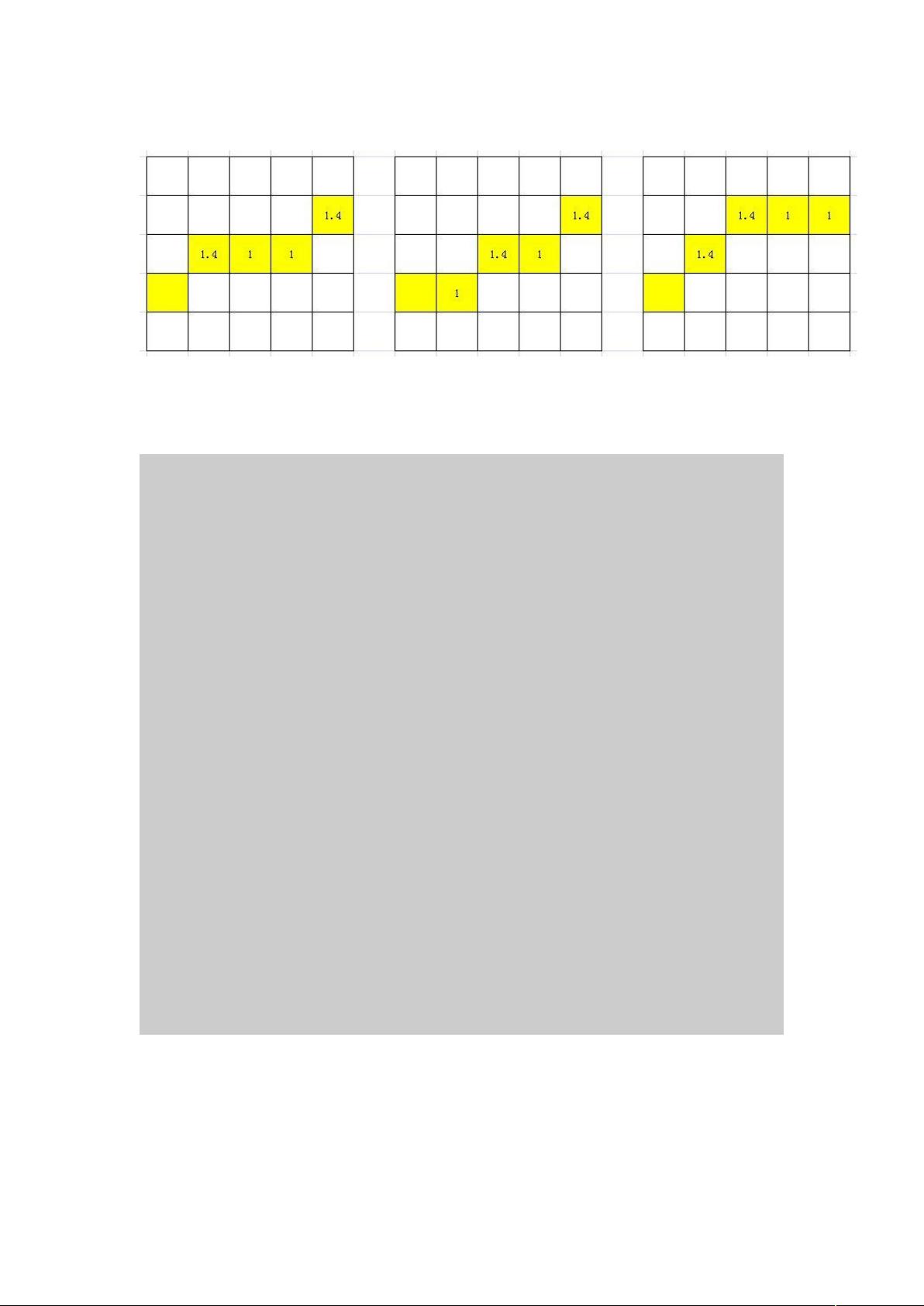
上图中三种不同的走法,总代价都是 &,就上图而言,最佳路径!最小代价$用
肉眼就能很快找出来,但是用代码如何估算起点与终点之间的代价呢?
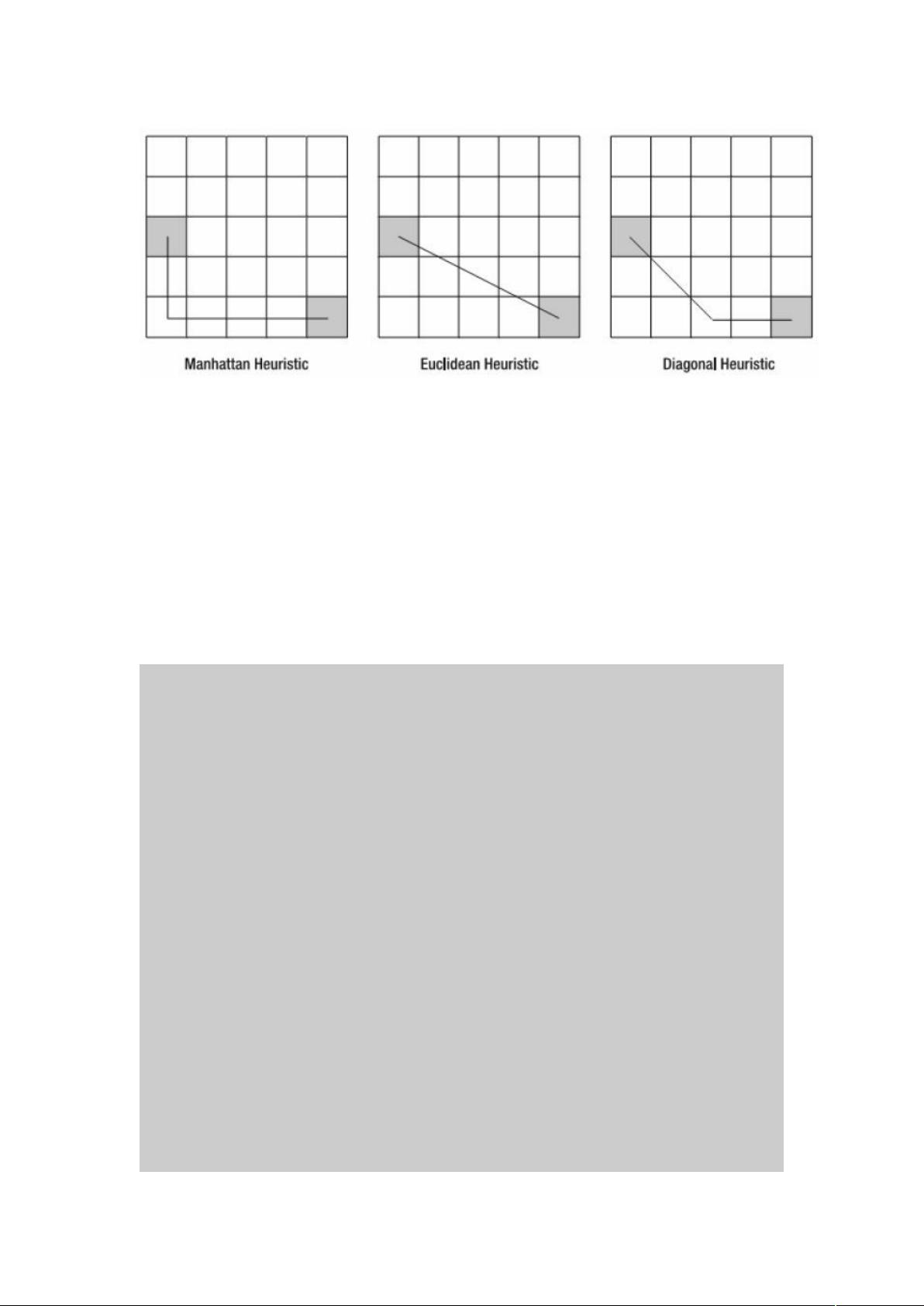
曼哈顿估价法
*(/*!#"#$"/
.
/*3!#0*'*6#"#0$**6%*,*3!#*,*
6#"#$**6%1
4
几何估价法
*(/*/#!#"#$"/
.
*#0"/+#0*'*6#"#01
*#"/+#*'*6#"#1
/*3@!#0**#0*,*#**#$**6%1
4
对角线估价法
*(/*#!#"#$"/
.
*#0"/+3!#0*'*6#"#0$1
*#"/+3!#*'*6#"#$1
*#"/+3!#0)*#$1
*"/+#0*,*#1
/*6#%**#*,*6%**!*'***#$1
4
上面的代码给出了三种基本的估价算法!也称估价公式$,其算法示意图如下:
剩余32页未读,继续阅读
2011-12-18 上传
2023-10-31 上传
2023-09-01 上传
2023-04-18 上传
2023-05-13 上传
2023-09-11 上传
2024-03-14 上传

hexiaoqiangc
- 粉丝: 6
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
