单片机控制舵机在17自由度仿人机器人中的应用
需积分: 9 188 浏览量
更新于2024-12-24
收藏 237KB PDF 举报
"文章介绍了在类人机器人上应用舵机的控制方法,特别是通过单片机实现多路舵机控制的方案。使用单片机内部定时器和分时复用技术,能够在不增加额外硬件的情况下,实现最多24路PWM输出,从而控制多个舵机。这种方法提高了系统的可靠性和控制精度,并在17自由度的仿人机器人上得到应用。"
正文:
舵机在类人机器人上的应用是至关重要的,因为它们提供了机器人的关节运动和精确定位。舵机,全称为伺服电机,是一种特殊的电动机,它能够根据接收到的脉冲宽度调制(PWM)信号来精确控制其旋转角度。在类人机器人中,舵机通常用于模拟人类关节的运动,如手臂、腿部和颈部等,使机器人能够执行复杂的动作。
在传统的舵机控制中,通常需要使用分立元件如比较器、晶体振荡器和逻辑门等来生成和调节PWM波形,这种方式不仅需要较多的硬件资源,而且电路复杂,容易出现故障。然而,随着微处理器技术的发展,尤其是单片机的广泛应用,控制舵机的方式得到了革新。
本文提出的单片机控制舵机的方法,巧妙地利用了单片机内部的定时器功能。定时器可以周期性地产生中断,通过编程控制中断服务程序,可以实现PWM波形的生成。通过分时复用技术,即在每个定时器中断事件中,快速切换到不同的舵机通道,使得单片机能够在同一时间内管理多个PWM输出,理论上可以达到单片机I/O端口允许的最大数量。
这一创新设计极大地简化了硬件结构,减少了分立元器件的数量,降低了成本,同时减少了因硬件连接导致的故障可能性。更重要的是,由于控制过程完全由软件实现,可以根据需要调整控制算法,从而提高控制精度,使得类人机器人的动作更加细腻和准确。
文中提到的17自由度仿人机器人是舵机控制技术的一个实例应用。17个自由度意味着机器人有17个独立可动的关节,这需要大量的舵机协同工作来实现。通过上述的单片机控制方法,这些舵机可以被有效地同步和协调,实现机器人的复杂运动模式。
总结来说,利用单片机控制舵机是现代类人机器人设计中的关键技术之一。通过单片机内部定时器和分时复用技术,可以高效地驱动多个舵机,降低了系统复杂性,提升了控制性能。这种方法对于未来更智能、更灵活的机器人设计具有重要的参考价值。
多舵机控制在类人机器人上的应用
锋
梁 , 王志良,
仑
解 ,
学
徐文
(北京科技大学 信息工程学院 北京 100083)
摘 要:舵机控制器是机器人的重要部件。采用一种新颖的利用单片机产生多路控制舵
机用 PWM 的方法,利用单片机内部定时器,采用分时复用技术,在不增加任何硬件电路的
前提下,用单片机实现多达 24 路 PWM 输出。该方法取代了传统的使用分立元件产生 PWM
波的方法,大大减少了分立元器件数目及电路连线,改善了系统可靠性,提高了控制精度,
并成功用在 17 自由度仿人机器人的控制系统中。
关键词:单片机;舵机;PWM 波;调速
中图分类号:TP242.6 文献标识码:A
The application of multi-servo control on humanoid robot
Liang,Feng Wang,Zhiliang Xie,Lun Xu,Wenxue
(School of Information engineering, University of Science and Technology Beijing,
Beijing,100083,China)
Abstract: Servo controller plays a very important role in humanoid robot. A novel method that
generates multiplex PWM waveforms using micro-single processor for controlling servos is
introduced. It maximizes the number of PWM waveforms to 24 by means of the combining
hardware timer and time-sharing multiplex technique without any additional hardware interface.
This method substitutes the conventional method, which uses discrete components. Then it leads
to reduce significantly the component count of the circuit and improve the reliability of the system
and the control accuracy. The proposed scheme has been successfully verified by the control
system of a 17 freedom humanoid robot.
Key words: Micro-single processor; servo; PWM waveform; governor
小型仿人机器人由于控制结构简单,扩展性好,在仿人机器人研究和其他领域正在得到
广泛的重视和应用。舵机是小型仿人机器人常用的输出执行机构。
1 舵机的构造和控制方法
通常的舵机有 3 条导线,分别是:电源线、地线、控制线。电源线和地线用于提供舵机
内部的直流电机和控制线路所需的能源,电压通常介于 4~7.2V 之间,控制线的输入是一
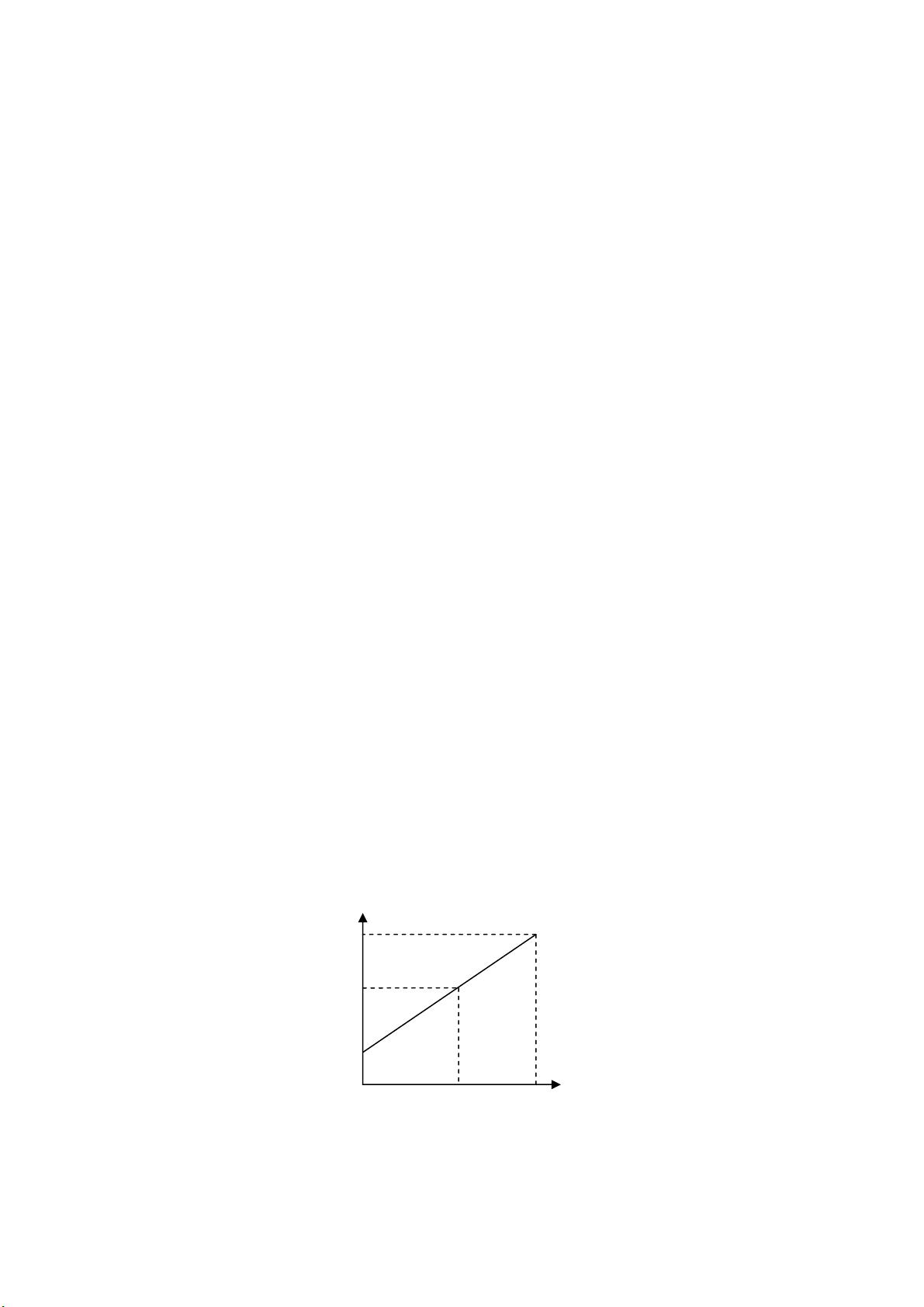
个宽度可调的周期性方波脉冲(PWM)信号。舵机转轴的角度随输入信号的脉冲宽度变化成
正比。两者之间的关系可用图 1 来表示。
图1 GM995舵机输出转角与输入信号脉冲宽度的关系
PWM信号标称的周期为20ms,事实上舵机对信号的周期要求很宽松,18~20ms均可,
角度 θ
时间 t
90 度 180 度
0.5ms
1.5ms
2.5ms
0 度
下载后可阅读完整内容,剩余3页未读,立即下载
2023-07-13 上传
143 浏览量
251 浏览量
2023-07-12 上传
119 浏览量
143 浏览量
点击了解资源详情
点击了解资源详情
2023-02-16 上传

houyuming123
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- PMSM控制和建模(FOC、SVPWM、THIPWM等)_磁场定向控制、空间矢量调制、弱磁、速度/转矩控制、电厂模型、自动校准和
- serverless-angular-user-data:ღˇ◡ˇ(ᵕ꒶̮ᵕෆ联手Anuglar,Netlify和Hasura以获得一些用户数据乐趣ღˇෆ
- 红色动态微立体创业融资计划书PPT模板
- qMedia:一个ComputerCraft程序,可用于在终端上创建动画(如Powerpoint)
- DS3232RTC:用于Maxim Integrated DS3232和DS3231实时时钟的Arduino库
- 工兵
- C-24-Box-Model
- recaptcha:[已取消] Laravel 5的reCAPTCHA验证器
- 链接5G频段wifi 显示saved,然后重复点击3次链接wifi,显示链接失败,ylog和空口抓包 抓包 8581new
- angularTools:尝试通过学习角度来做点事情
- 点击图片展开或者收起代码
- Ajax-Rails-4-AJAX-modal-form-render-JS-response-as-table-row.zip
- 简约农村三层别墅建筑设计.rar
- 魔术8球
- 蓝灰色创意公司简介PPT模板
- ESPHelper:一个使ESP8266上使用WiFi和MQTT变得容易的库
