机器人运动学详解:串联机器人与运动学问题
147 浏览量
更新于2024-07-14
收藏 1.66MB PDF 举报
"第九章机器人运动学主要探讨了机器人在时间变化中的运动特性,不涉及导致这些运动的力和力矩。这一章深入研究了关节变量与末端执行器位置和姿态之间的关系,特别是对于串联机器人和并联机器人这两种类型的运动学特性进行了对比。运动学正问题和逆问题作为运动学研究的核心,分别关注如何根据关节角度确定末端执行器的位置和如何找到实现特定位置所需的关节角度。"
在机器人运动学中,我们首先需要理解的是两种主要的机器人类型:串联机器人和并联机器人。串联机器人,如PUMA560,以其大的工作空间、灵活性和较低的刚度而闻名,但其缺点是误差会随着关节的增加而累积。相反,并联机器人,如Hexapod,以其高刚性、大负载能力和误差不积累为特点,但其工作空间和姿态范围相对较小。本章主要聚焦于串联机器人的运动学分析。
运动学是机器人学的一个关键分支,它关注机器人的运动表示。运动学正问题,也称为直接运动学,涉及到已知机器人关节的角度,计算出末端执行器在固定参考坐标系中的位置和姿态。这个问题通常通过解齐次变换矩阵来解决。而运动学逆问题,或称间接运动学,则是从期望的末端执行器位置和姿态出发,反向求解所需关节角度,以使机器人能够到达目标位置。解决这个问题可能有多种不同的关节配置。
运动学正问题的解决方案可以用于机器人路径规划,确保机器人能够准确地到达工作空间内的特定点。而运动学逆问题则对机器人控制至关重要,因为它允许机器人根据任务需求调整其关节角度,以达到指定的目标位置和姿态。
在实际应用中,运动学的这两个方面是紧密相关的。例如,在自动化生产线上的装配任务中,运动学正问题可以帮助计算出机器人手臂应该移动到何处以抓住零件,而运动学逆问题则决定如何精确地调整各个关节的角度来实现抓取和放置动作。此外,这两个问题的解决也是机器人避障和自主导航的基础。
第九章机器人运动学深入探讨了机器人运动的理论和实际应用,为理解和设计高效、精确的机器人控制系统提供了基础。无论是学术研究还是工业应用,理解并掌握运动学都是至关重要的。
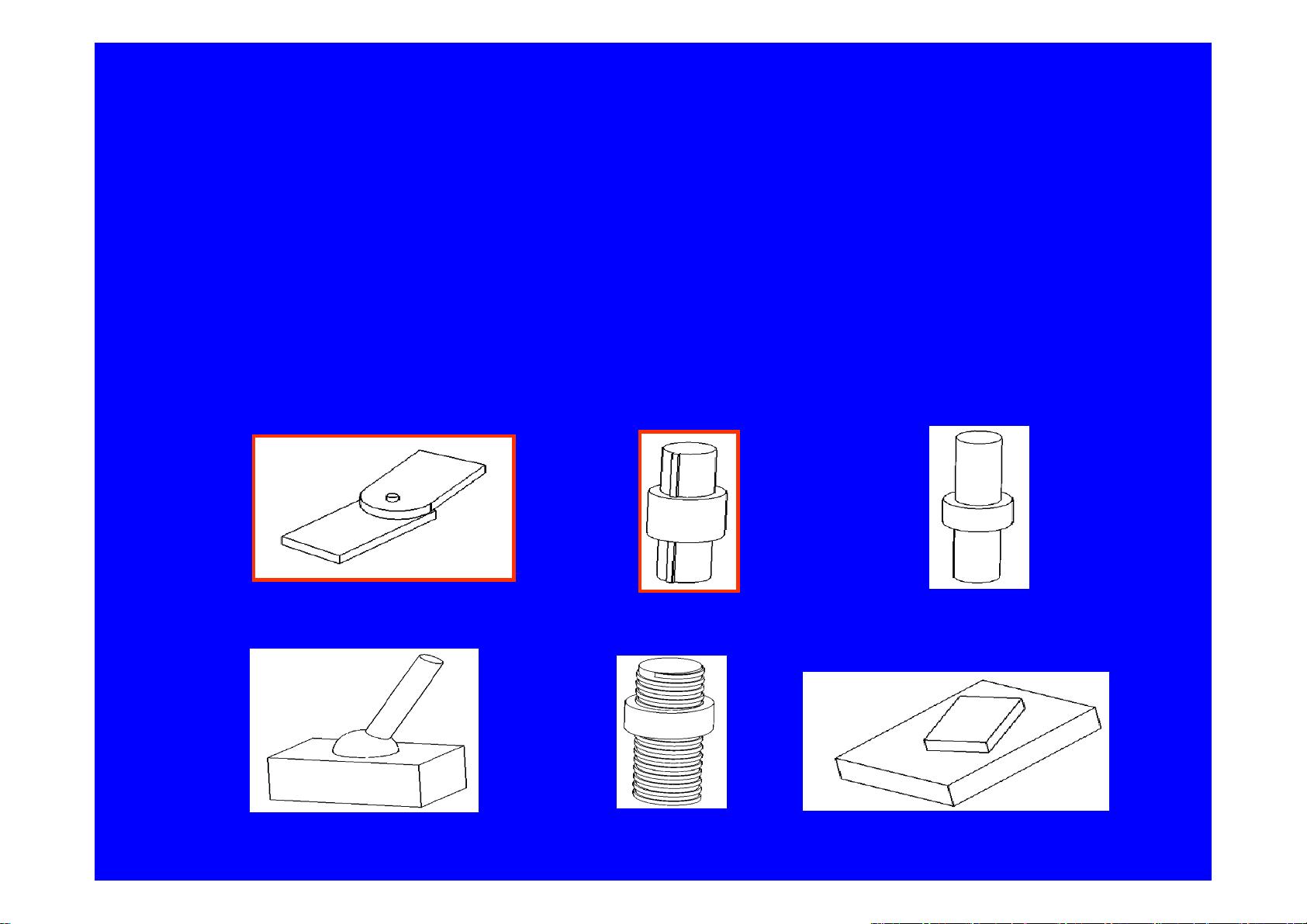
关节:
一般说来,两个杆件间是用低副相联的
只可能有6种低副关节:旋转(转动)、棱柱(移动)、
圆柱形、球形、螺旋和平面,其中只有旋转和棱柱形关
节是串联机器人操作机常见的,各种低副形状如下图所
示:
旋转
棱柱形
柱形
球形
螺旋形
平面
剩余66页未读,继续阅读
2014-09-24 上传
2021-09-29 上传
2021-03-22 上传
点击了解资源详情
2021-09-23 上传
2021-08-13 上传
2021-08-14 上传
2018-03-30 上传
2021-09-25 上传

weixin_38746166
- 粉丝: 8
- 资源: 959
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
