车载视觉行人检测与跟踪技术:Adaboost与Kalman滤波结合
66 浏览量
更新于2024-08-31
1
收藏 423KB PDF 举报
"基于车载视觉的行人检测与跟踪方法"
基于车载视觉的行人检测与跟踪方法是现代智能交通系统中的一项关键技术,旨在提升城市交通环境下的车辆主动安全性,以减少行人交通事故的发生。这种方法利用车载视觉传感器收集的信息,通过高级算法来识别和追踪行人,从而为自动驾驶车辆或辅助驾驶系统提供关键的数据支持。
首先,Adaboost算法在此方法中起到了关键作用。Adaboost是一种机器学习算法,特别适用于构建弱分类器的组合,以形成一个强分类器。在行人检测中,Adaboost被用来训练样本,特别是利用Haar特征。Haar特征是一种基于像素差异的特征,常见于面部识别等领域,它能够有效地捕捉图像中的边缘和结构信息。通过Adaboost算法,可以生成一个级联分类器,该分类器能快速准确地在图像中定位行人,减少了计算复杂度,提高了检测速度。
接着,Kalman滤波器被用于行人跟踪。这是一种状态估计算法,能够在存在噪声的情况下有效地预测和更新目标的状态。在行人检测中,一旦行人被检测到,Kalman滤波器便开始工作,根据前一时刻的预测状态和当前观测值,计算出最可能的真实状态。这种连续的预测和校正过程使得系统能够准确地跟踪行人的运动轨迹,即使在复杂环境中也能保持良好的稳定性。
实验结果显示,该方法具有较高的实时性和准确性。平均每个图像帧的处理时间大约为80毫秒,检测率高达88%,这意味着在实际应用中,系统能在短时间内识别并定位大量行人,有效地减少了漏检的可能性。当引入Kalman滤波器进行跟踪后,处理时间进一步降低至55毫秒/帧,这确保了系统的实时响应能力,对于快速变化的交通场景尤为重要。
行人保护技术的发展对于降低交通事故伤亡率至关重要。考虑到我国混合交通模式的特点,行人安全问题尤为突出。随着汽车保有量的增长,行人和骑行者在交通事故中的伤亡比例持续上升。因此,研究和应用如基于车载视觉的行人检测与跟踪技术,不仅有助于提升汽车的安全性能,也是解决这一社会问题的有效途径。
这项技术通过结合Adaboost行人检测和Kalman滤波器跟踪,为车辆提供了强大的行人感知能力,对于提高交通安全性,尤其是保护行人的生命安全,有着显著的意义。未来,随着深度学习和计算机视觉技术的进一步发展,这类方法的性能有望得到更大的提升,为智能交通系统的完善做出更大贡献。
基于车载视觉的行人检测与跟踪方法基于车载视觉的行人检测与跟踪方法
摘要: 为提高城市交通环境下车辆主动安全性,保障行人安全,提出了基于车载视觉传感器的行人保护方法。利
用Adaboost 算法实现行人的快速检测,结合Kalman 滤波原理跟踪行人,以获取其运行轨迹。 该方法利用离散
Adaboost 算法训练样本类Haar 特征,得到识别行人的级联分类器,遍历车载视觉采集的图像,以获取行人目
标;结合Kalman 滤波原理,对检测到的行人目标进行跟踪,建立检测行人的动态感兴趣区域,利用跟踪结果分
析行人的运行轨迹。 试验表明: 该方法平均耗时约80 ms /帧,检测率达到88%; 结合Kalman 滤波原理跟踪后,
平均耗时降到55 ms /帧,实时性较好。 随
摘要: 为提高城市交通环境下车辆主动安全性,保障行人安全,提出了基于车载视觉传感器的行人保护方法。利用
Adaboost 算法实现行人的快速检测,结合Kalman 滤波原理跟踪行人,以获取其运行轨迹。 该方法利用离散Adaboost 算法训
练样本类Haar 特征,得到识别行人的级联分类器,遍历车载视觉采集的图像,以获取行人目标;结合Kalman 滤波原理,对检
测到的行人目标进行跟踪,建立检测行人的动态感兴趣区域,利用跟踪结果分析行人的运行轨迹。 试验表明: 该方法平均耗时
约80 ms /帧,检测率达到88%; 结合Kalman 滤波原理跟踪后,平均耗时降到55 ms /帧,实时性较好。
随着汽车保有量的不断增加,道路交通事故和因车祸伤亡的人数居高不下。 为满足人们对汽车安全性能要求的日益提高,
越来越多的先进技术被应用到汽车主动安全领域。在道路交通事故中,主要的受害群体是参与交通系统中的行人和骑自行车的
人等。据美国高速公路安全管理局( NHTSA) 的资料显示,2008 年美国由于交通事故导致69 000 个行人死亡或者受伤、4
378 个行人死亡,行人死亡人数占全年交通事故死亡总人数的11. 7%。2007 年我国因交通事故导致行人死亡的人数为21 106
人,占交通事故死亡总人数的25. 9%,行人受伤人数为70 838 人,占交通事故受伤总人数的18. 6%. 与一些发达国家相比,由于
我国的交通模式主要是混合交通模式,导致交通事故死亡原因和伤害模式与发达国家不同。
近年来,为保障行人安全、提高汽车主动安全性能,国内外一些科研院所对行人保护技术进行了研究探讨,在不断完善汽
车被动安全系统的同时,逐渐发展和应用主动安全系统,结合行人保护概念和技术的引入,完善对行人的保护。 如Bajracharya
等建立了双目视觉行人保护集成系统,实现道路交通场景下40 m 距离范围内行人的检测与跟踪。
Munder 等融合行人的点分布形状模型和纹理特征建立了行人识别分类器,采用基于粒子滤波的贝叶斯方法实现行人的跟
踪。德国Enzweiler 等分别针对统计学习中的小波特征、线性支持向量机以及神经网络的方法进行比较分析,通过设计不同尺度
的分类器来检测图像中的行人。清华大学的江帆等提出一种基于模型融合的行人跟踪算法,结合离线学习和在线互学习对模型
进行更新。中国科学技术大学程有龙等将行人检测的先验知识融入到跟踪模型自学习过程中,对被跟踪行人进行动态建模,从
而实现在真实监控场合下跟踪具有复杂运动的行人。多传感器信息融合以及行人模型的建立要求较大的计算量和计算参数,很
难满足类似车辆主动安全预警等系统实时性要求。 本文采用车载单目视觉传感器,利用训练得到的行人识别级联分类器实时获
取车辆前方的行人,并对其进行跟踪以记录其运动轨迹,从而为驾驶员和行人的有效预警提供技术参考。
1 基于基于Adaboost 算法的行人检测算法的行人检测
1. 1 Adaboost 算法原理算法原理
Adaboost 算法通过训练得到由分类能力一般的弱分类器叠加而成的强分类器,再将若干个强分类器串连成一个级联分类器
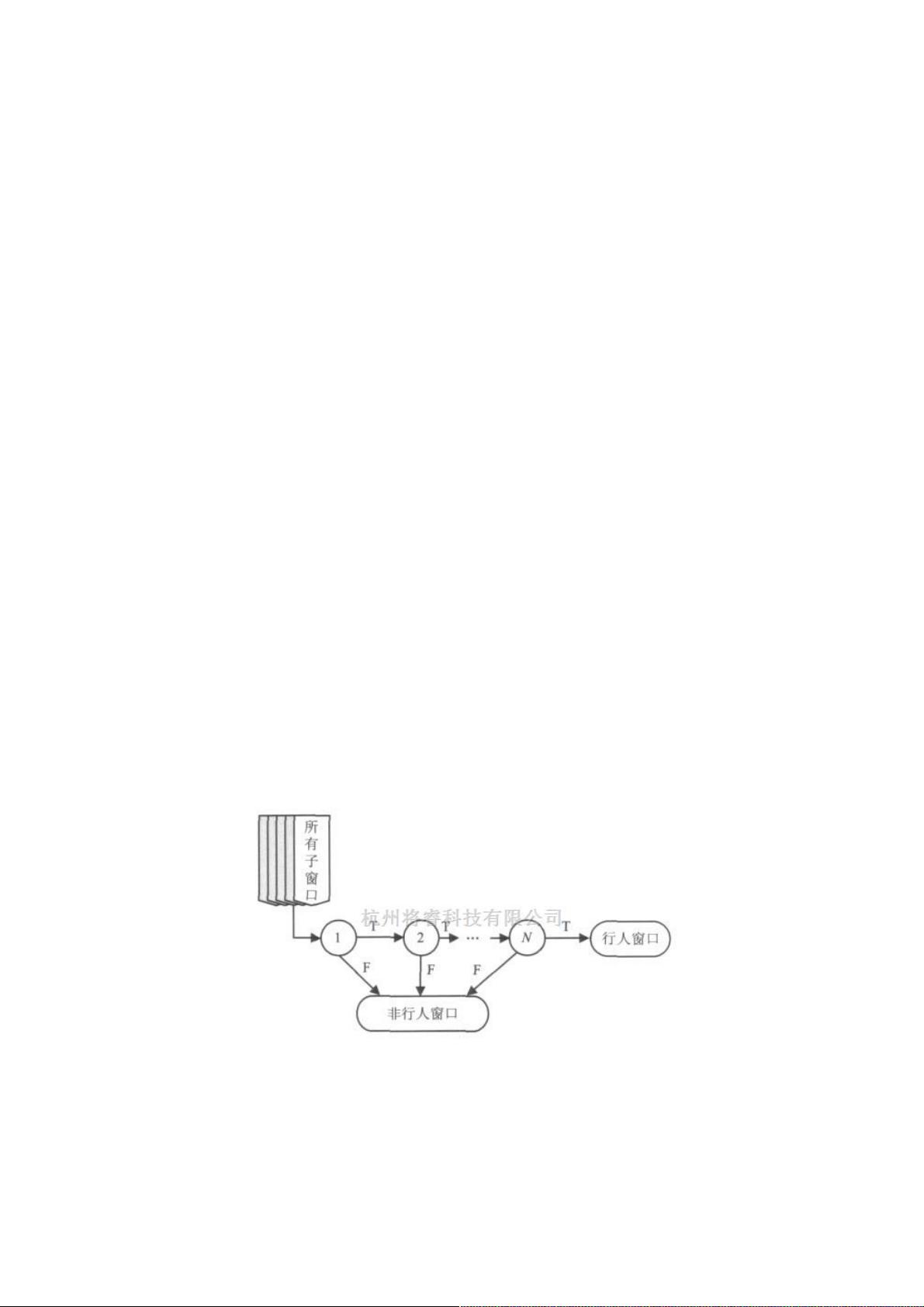
来遍历图像。为快速实现行人的检测和防撞预警,鉴于Adaboost 算法的特点,本文选择离散Adaboost 算法训练得到识别行人
的级联分类器,以快速排除图像中大部分非行人窗口,其结构如图1 所示。 其中,各阶段的强分类器训练过程如图2 所示。
图1 N 阶级联分类器结构示意
下载后可阅读完整内容,剩余6页未读,立即下载
2018-12-10 上传
2021-04-16 上传
点击了解资源详情
点击了解资源详情
2021-09-25 上传
2021-10-03 上传
2023-11-01 上传
2022-06-21 上传
2021-08-31 上传

weixin_38713061
- 粉丝: 2
- 资源: 939
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
