雷克萨斯LS系列:匠心艺境,豪华内室解析
版权申诉
46 浏览量
更新于2024-07-18
收藏 14.13MB PDF 举报
"这是一份关于雷克萨斯LS系列车型的手册,涵盖了车辆的外观、内室、性能、安全和服务等方面的信息,旨在帮助非汽车用户和车主更好地理解和操作该车型。"
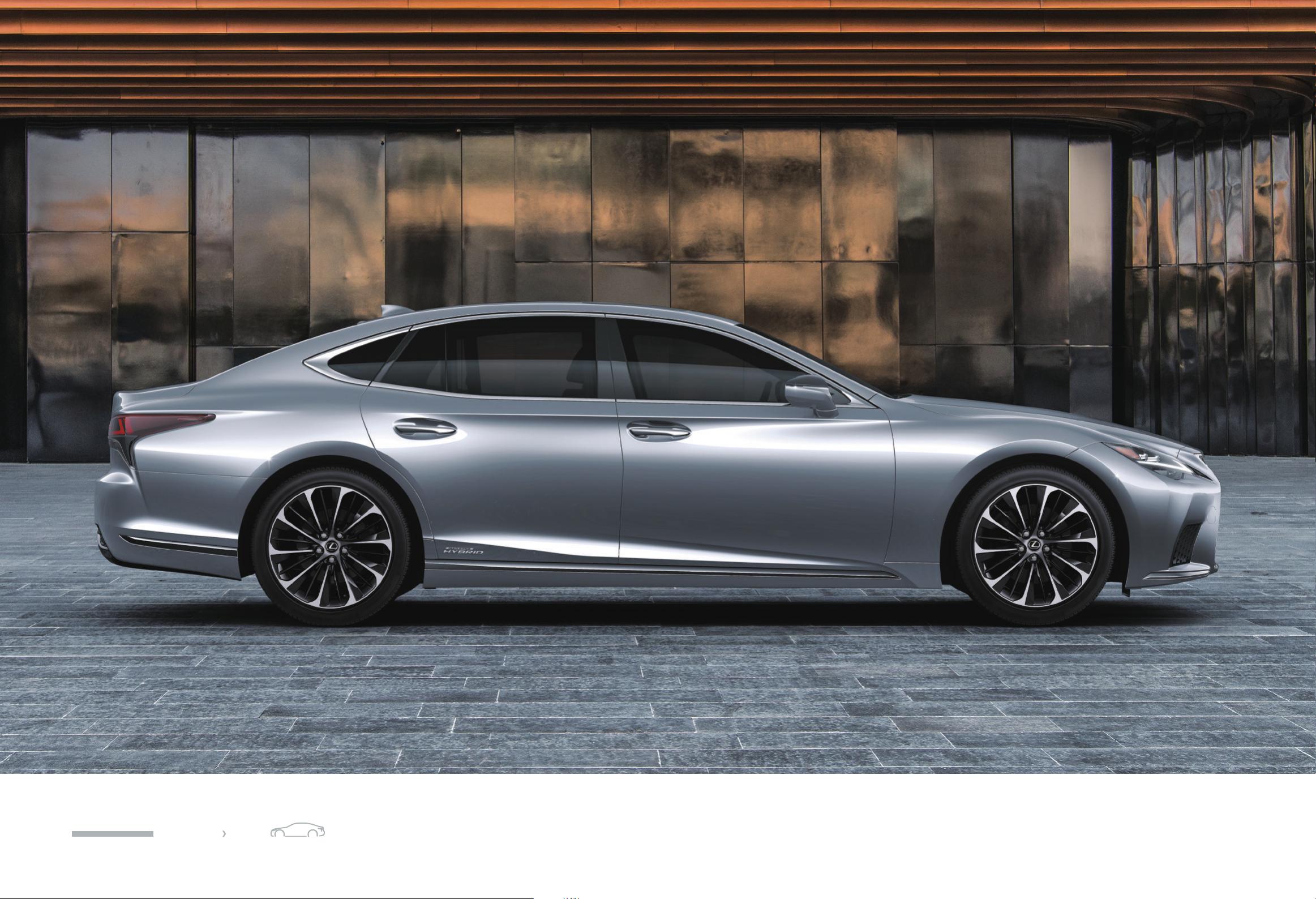
雷克萨斯LS系列作为豪华轿车的代表,其设计哲学强调内外兼修,追求君子般的低调奢华。在外形设计上,车辆注重光而不耀的美学,通过家族式的纺锤形前格栅和熏黑工艺,展现出深邃且不失大气的风格。L型矩阵式LED大灯不仅提供出色的照明效果,还增添了车辆的科技感。车身颜色如极影银,采用特殊工艺制作,呈现流动的美感。此外,全新20英寸熏黑轮毂则提升了车辆的运动气息和层次感。
进入内室,雷克萨斯LS系列展现了对细节的极致追求。内室设计遵循"凝聚时光之设计"的哲学,创造出一个充满雅致和舒适的空间。独特的装饰如凌光切子衬鹤羽折布、白金叶箔衬西阵织锦,以及天然艺木与写意水墨纹理的结合,将东方艺术融入车内,营造出浓厚的文化氛围。中控台线条灵感源自古筝和茶筅,行灯式内饰氛围灯则带来温馨的照明体验。座椅采用低弹性聚氨酯填充,兼顾了舒适度和减震性能。
在性能方面,虽然手册未详细描述,但可以推测雷克萨斯LS系列将搭载先进的动力系统,可能包括高效的汽油发动机或混合动力系统,配合精准的悬挂调校,确保行驶平稳性和驾驶乐趣。同时,车辆的安全配置也应十分完备,包括各种主动和被动安全功能,如碰撞预警、自动紧急刹车、盲点监测等,以保障乘客的安全。
至于服务,雷克萨斯通常提供全面的售后服务,包括保养、保修、道路救援等,以确保车主无忧用车。手册中可能还会详细介绍这些服务的具体内容和流程。
雷克萨斯LS系列车型手册是一部全面指导用户了解和使用车辆的重要参考,它不仅介绍了车辆的外观和内室设计,还涵盖了性能、安全和服务等多个方面,旨在为用户提供一个全方位的用车体验。
1
外观
EXTERIOR
以上所示图片仅供参考,中国区销售的具体车型配置,请以实车为准。
03 04
匠心艺境,浑然天成
是艺术关于美的想象,更是匠心倾注的时光。
意蕴悠远的外观设计,为每一段旅程注入美与温暖。
无声中惊艳时光,无形中照亮日常,静水流深,和光同尘。
剩余14页未读,继续阅读
2021-08-22 上传
2021-08-22 上传
2021-08-22 上传
2021-08-22 上传
2021-08-22 上传
2021-08-22 上传
2021-08-22 上传
2021-12-18 上传
2022-01-13 上传

好知识传播者
- 粉丝: 1669
- 资源: 4133
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
