四元数与三维旋转:直观解析
"该资源是一篇关于四元数与三维旋转的详细文章,作者Krasjet旨在探讨四元数在3D旋转中的应用,以及如何用几何学和线性代数的知识来理解这一概念。文章包含MATLAB/Octave的示例代码和相关动画,可在GitHub上找到。作者提醒读者,文章可能不适用于物理学或抽象代数的学习者,但提供了拓展阅读资源。文章以CCBY-NC-SA4.0协议发布,要求署名和非商业使用。"
四元数是一种扩展复数的概念,用于解决三维空间中的旋转问题。在进入四元数的讨论之前,文章首先简要介绍了复数,因为两者之间有许多相似性。复数由实部和虚部构成,形式为\( z = a + bi \),其中\( a, b \)是实数,\( i \)是虚数单位,满足\( i^2 = -1 \)。复数可以看作是在二维平面上的一种向量表示,其旋转可以通过复数乘法实现。
四元数(Quaternion)是由三个虚部(Imaginary Units)\( j, k \)扩展复数概念而来的,除了实部外,还有三个虚部分量,形式为\( q = w + xi + yj + zk \),其中\( w, x, y, z \)都是实数。与复数不同的是,四元数的虚部满足特定的乘法规则,即\( ij = k, jk = i, ki = j \),同时这些关系遵循反交换律(Anti-commutative),即\( ji = -k, kj = -i, ik = -j \)。
四元数与三维旋转的关系在于,它们提供了一种简洁且无旋积(Non-commutative)的方式去描述空间中的旋转。在计算机图形学中,四元数被广泛应用于表示和计算物体的旋转状态。相比于欧拉角(Euler Angles)和旋转矩阵(Rotation Matrix),四元数避免了万向锁(Gimbal Lock)问题,即在某些情况下,欧拉角可能会丢失一维度的自由度。
通过四元数乘法,可以轻松地将两个旋转合并,这在处理连续的旋转动作时非常有用。四元数的逆(Inverse)代表相反的旋转,其计算相对简单,为\( q^{-1} = \frac{\bar{q}}{|q|^2} \),其中\( \bar{q} \)是四元数的共轭,\( |q| \)是四元数的模(Magnitude)。四元数的模保持旋转的幅度不变,而共轭确保旋转方向相反。
文章中可能包含MATLAB/Octave代码示例和动画,这些可视化工具有助于读者直观地理解四元数旋转的效果。通过这些代码,读者可以亲手操作四元数,进一步加深对四元数旋转的理解。
在计算机图形学中,四元数通常用于游戏开发、3D建模和模拟等场景,它们在数学上的优雅性和计算效率使其成为处理三维旋转的理想工具。尽管四元数的理论较为抽象,但借助几何学和线性代数的知识,我们可以更好地理解和应用这一概念。对于想要深入学习四元数的读者,作者提供的拓展阅读资源可能是个不错的选择。
注意,在这篇教程中我们将使用右手坐标系统,并且我们将使用右手定则来定义
旋转的正方向.你可以将右手拇指指向旋转轴 u 的正方向,这时其它四个手指弯曲
的方向即为旋转的正方向.在上图中即为逆时针方向.对于左手坐标系情况的讨论
请见第 9 章.
在轴角的表示方法中,一个旋转的定义需要使用到四个变量:旋转轴 u 的 x, y, z 坐
标,以及一个旋转角 θ,也就是我们一共有四个自由度 (Degree of Freedom).这很明显
是多于欧拉角的三个自由度的.实际上,任何三维中的旋转只需要三个自由度就可
以定义了,为什么这里我们会多出一个自由度呢?
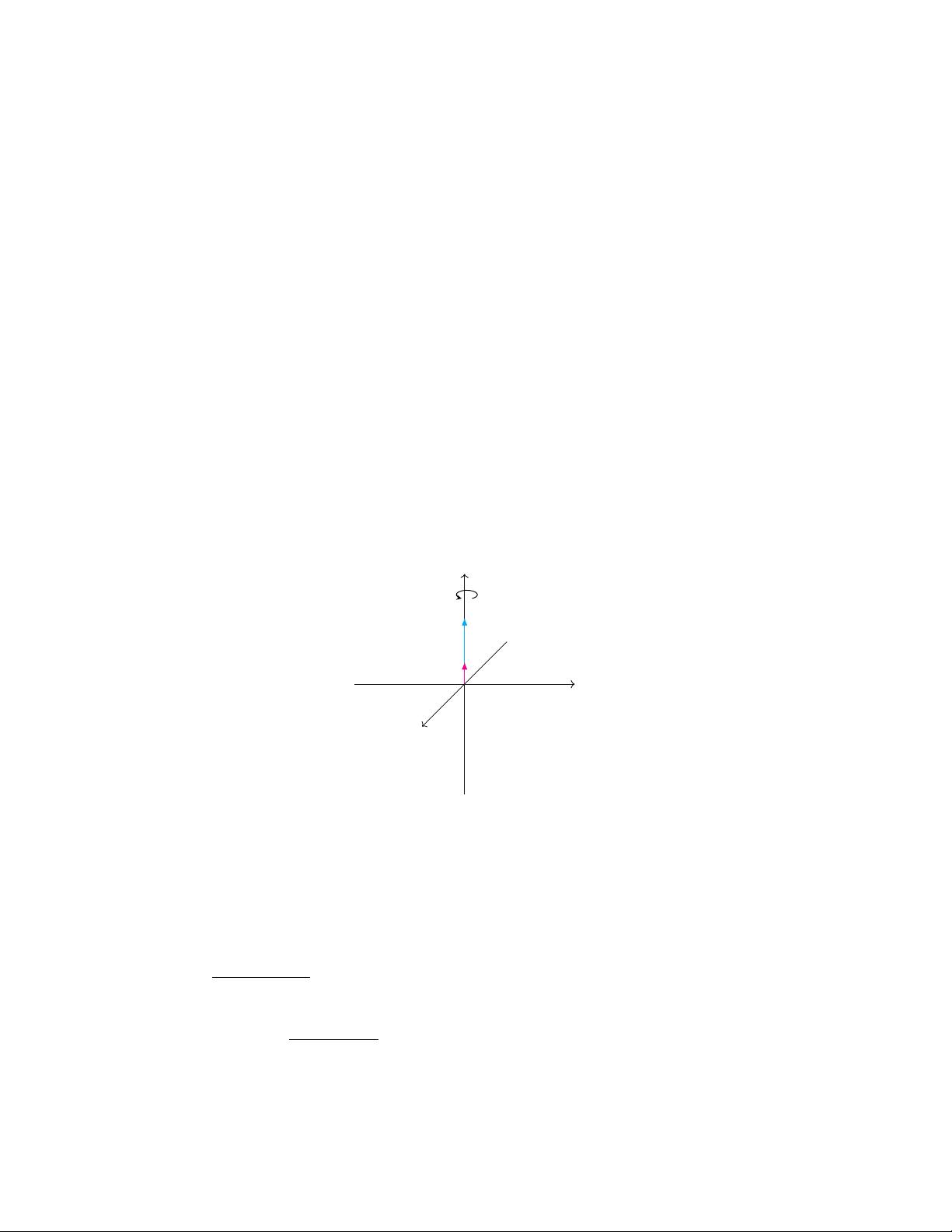
其实,在我们定义旋转轴 u 的 x, y, z 坐标的同时,我们就定义了 u 的模长(长度).
然而,通常情况下,如果我们说绕着一个向量 u 旋转,我们其实指的是绕着 u 所指
的方向进行旋转.回忆一下向量的定义:向量是同时具有大小和方向的量,但是在这
里它的大小(长度)并不重要.我们可以说绕着 u
1
= (0, 0, 1)
T
这个轴进行旋转,也
可以说绕着 u
2
= (0, 0, 3)
T
旋转.虽然这两个向量完全不同,但是它们指向的都是同
一个方向(即 z 轴的方向):
y
z
x
u
2
u
1
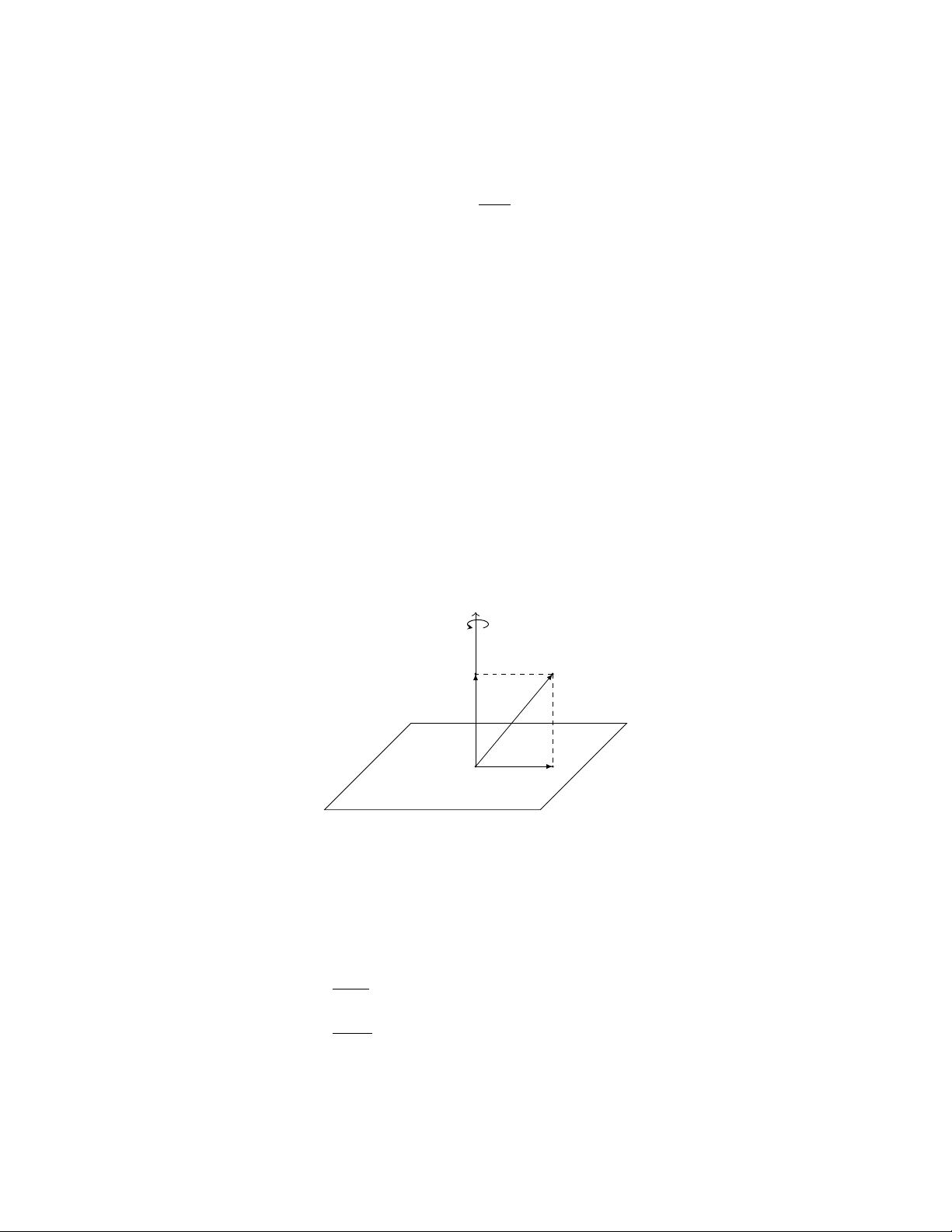
在三维空间中定义一个方向只需要用到两个量就可以了(与任意两个坐标轴之间
的夹角).最简单的例子就是地球的经纬度,我们仅仅使用经度和纬度两个自由度就
可以定义地球上任意一个方位.而如果我们要表示某一个方位上的特定一个点,则
还需要添加海拔这个自由度.
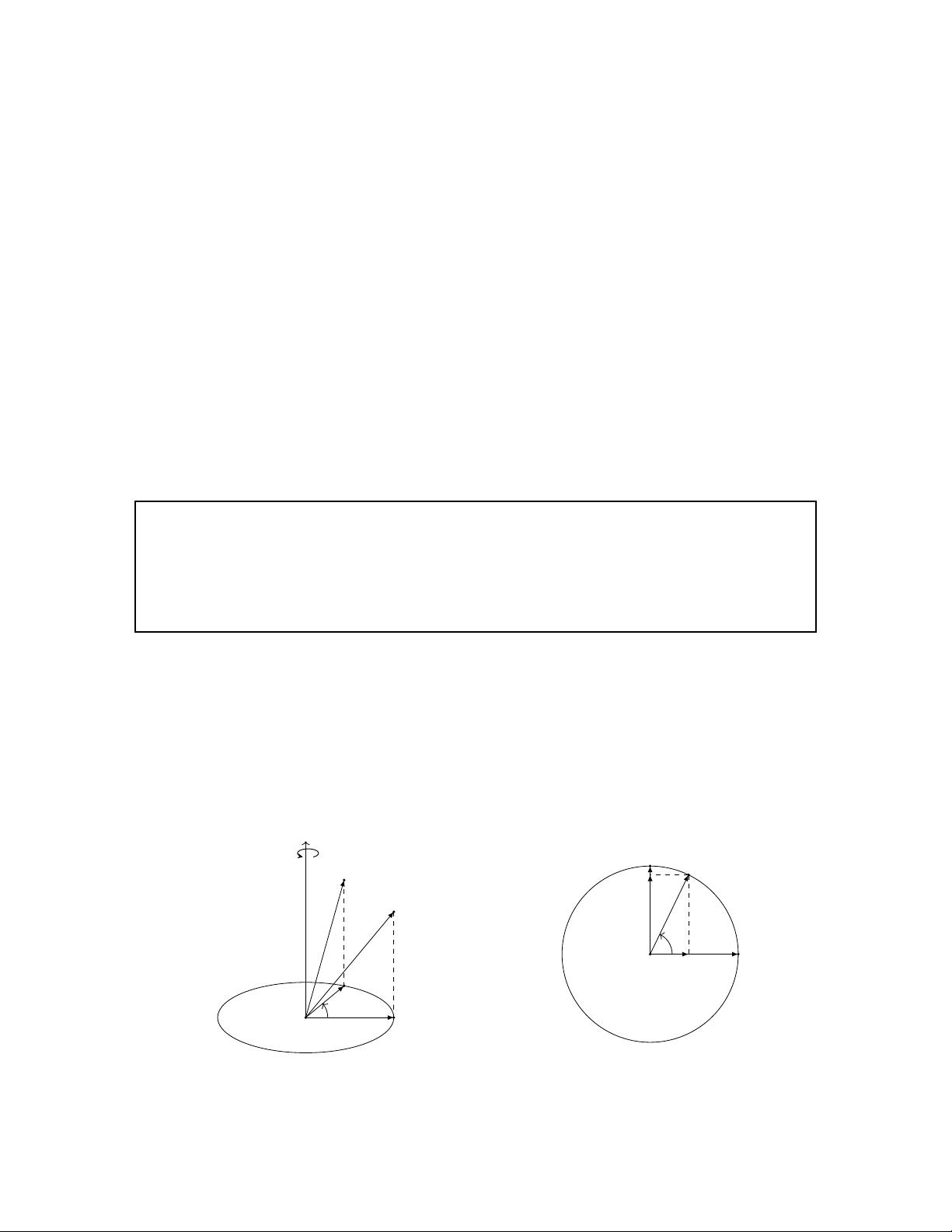
为了消除旋转轴 u 模长这个多余的自由度,我们可以规定旋转轴 u 的模长为
∥u∥ =
p
x
2
+ y
2
+ z
2
= 1,也就是说 u 是一个单位向量.这样子一来,只要给出 u
的任意两个坐标,我们都能求出第三个坐标.比如,我们规定了 u 的 x, z 坐标,那
么就能得到 y =
√
1 − x
2
−z
2
.我们其实可以将模长规定为任意的常量,但是规定
∥u∥ = 1 能为我们之后的推导带来很多的便利,这也是数学和物理中对方向定义的惯
例.
12
剩余72页未读,继续阅读
213 浏览量
298 浏览量
点击了解资源详情
2021-09-13 上传
563 浏览量
517 浏览量
148 浏览量
298 浏览量

RobotLaw
- 粉丝: 11
 我的内容管理
展开
我的内容管理
展开








最新资源
- 掌握QML编程:最新版教程资源下载指南
- 掌握JS实现新闻图片多种切换效果
- 在WPF中开发微信风格Toast通知控件
- C#实现ArcGIS Engine动态路径追踪技术分享
- 介绍wheelnav.datetime.js:轮导航库的日期时间插件
- Chrome DNS缓存一键清除工具介绍
- 易语言实现注册表快速定位的源码解析
- 邮箱找回密码方法:JSP代码实现简单操作
- Drools增量更新功能概念证明与应用
- Delphi XML XMLDocument源码与注释解析
- iPhone/iPad Cocos2D游戏开发源码解析
- tb-video-player: KISSY组件升级与功能介绍
- 易语言实现输出面板文本一键清除的源码分析
- Adobe PDF打印机7压缩包内容详解
- PSDTO3D9.2:3D设计与立体画制作软件
- Gow-0.5.0:Windows下的小巧Linux工具集成环境
