硅光调制器正交和最小偏置点锁定的无抖动技术研究
版权申诉
128 浏览量
更新于2024-06-27
收藏 579KB DOCX 举报
"马赫-曾德尔结构硅光调制器正交和最小偏置点锁定的无抖动技术"
本文提出了一种用于马赫-曾德尔结构(MZ)硅光调制器无抖动的正交(Quad)和最小(Null)偏置点锁定方案。该方案采用了一对差分的光电探测器(MPD)作为闭环控制信号反馈元件,将这一对差分MPD电流的比值记为归一化光电流,并基于该归一化光电流分别构造了相位偏置在90°的Quad点和180°的Null点的误差函数。
**知识点1:马赫-曾德尔结构硅光调制器**
马赫-曾德尔结构(MZ)硅光调制器是一种常用的光调制器结构,广泛应用于高速数据传输和光通信系统中。MZ结构硅光调制器的工作原理是基于硅光调制器的相位调制和偏置点锁定,通过调整硅光调制器的偏置点来实现光信号的调制。
**知识点2:差分光电探测器(MPD)**
差分光电探测器(MPD)是闭环控制信号反馈元件,用于检测硅光调制器的输出信号,并将其转换为电信号。MPD由两部分组成:inphase-MPD和outerphase-MPD。在 Quad 点锁定中,inphase-MPD 和 outerphase-MPD 的电流比值被用来构造误差函数,以实现 Quad 点的锁定。
**知识点3:归一化光电流**
归一化光电流是指将 MPD 电流的比值标准化,以便于计算 Quad 点和 Null 点的误差函数。归一化光电流是该方案的关键组件,它将 MPD 电流转换为标准化的光电流,用于计算误差函数。
**知识点4:Quad 点和 Null 点锁定**
Quad 点和 Null 点锁定是硅光调制器的两个重要锁定点。Quad 点锁定是指硅光调制器的偏置点锁定在 90° 相位偏置,而 Null 点锁定是指硅光调制器的偏置点锁定在 180° 相位偏置。Quad 点和 Null 点锁定对硅光调制器的性能和稳定性至关重要。
**知识点5:误差函数**
误差函数是用于计算 Quad 点和 Null 点锁定的关键组件。对于 Quad 点锁定,误差函数是归一化光电流和差分 MPD 响应度比值的差值。对于 Null 点锁定,误差函数是归一化光电流相对于热光相移器热功率偏置点的一阶导数。
**知识点6:仿真验证**
为了验证该方案的有效性,作者进行了仿真验证,使用 53GBaud 四电平脉冲幅度调制(PAM4)测试平台和 53GBaud 二进制相移键控(BPSK)仿真平台验证了所提算法对 MZ 硅光调制器 Quad 点和 Null 点的锁定精度。
本文提出了一种用于马赫-曾德尔结构硅光调制器正交和最小偏置点锁定的无抖动技术,该技术采用差分光电探测器和归一化光电流来实现 Quad 点和 Null 点的锁定,具有重要的理论和实践价值。
为了将 MZ 硅光调制器应用于上述两种封装形态的高速光模块中,需要提出一种新的相位
偏置点锁定技术以实现 Quad 和 Null 偏置点的实时锁定。本文根据硅基光调制器的理论模
型提出了一种无抖动方式实现 MZ 硅光调制器 Quad 和 Null 偏置点锁定的技术,该方案不
需要在硅基调制器 bias 引脚上施加微扰信号即可实现硅基调制器 Quad 和 Null 偏置点的闭
环锁定。整个文章共包括 5 章:第 2 章基于硅基调制器的理论模型给出了无抖动锁定方案
的实现原理;第 3 章给出了锁定方案的实现步骤,并通过数值模拟验证了方案的理论可行
性;第 4 章介绍了基于所提出方案的验证结果;第 5 章总结了本文的主要成果。
2 控制方案的理论分析
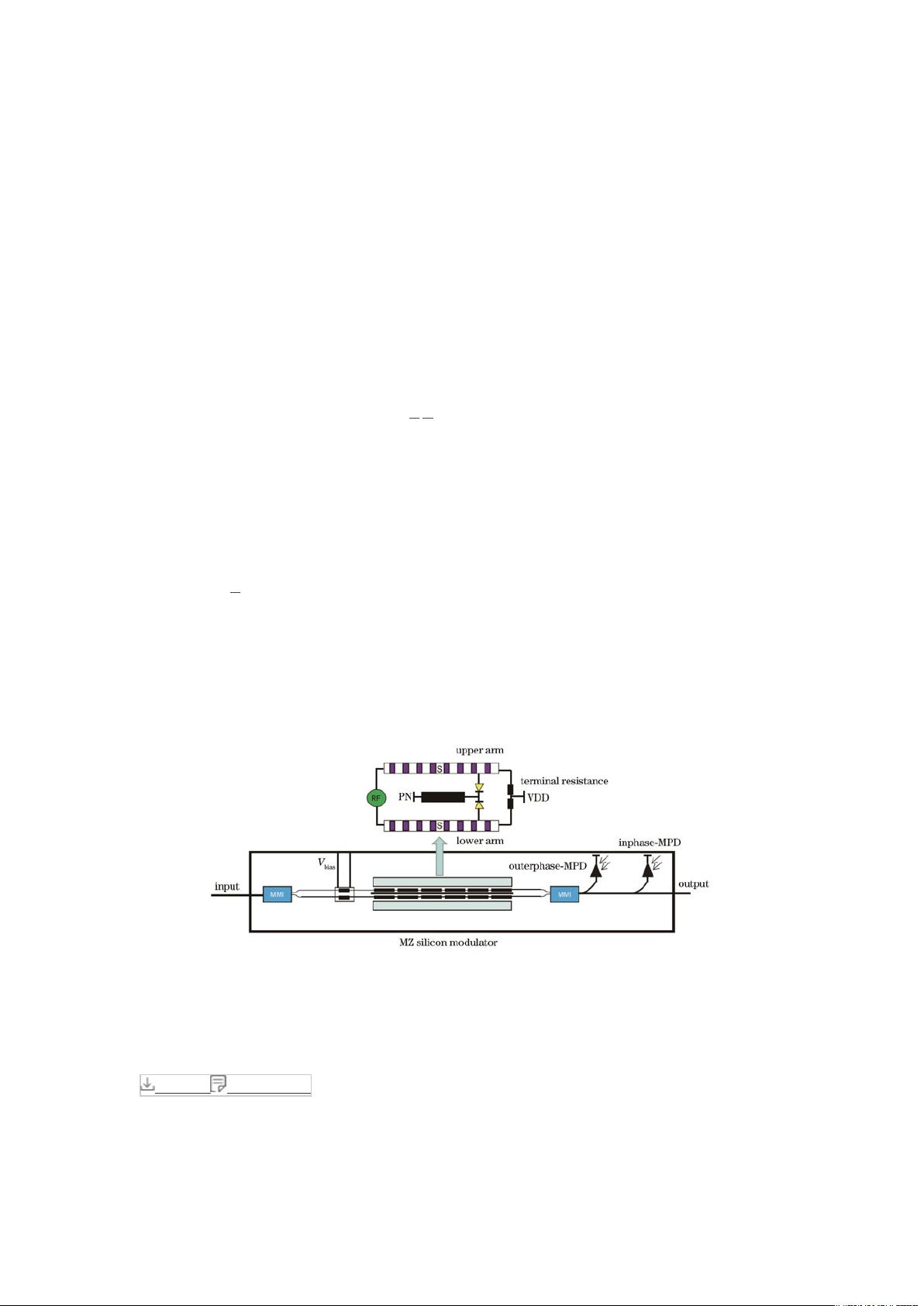
图 1 给出了 MZ 硅光调制器的模型图
[20-21]
,该调制器包括一个 1×2 多模干涉(MMI)输
入耦合器、一对 2×2 MMI 输出耦合器、一个与输出同相位的 MPD(inphase-MPD)和一
个与输出相位相差 180°的 MPD(outerphase-MPD)。在 MMI 输入耦合器中:一个热光
相移器用于调节 MZ 硅光调制器的直流(DC)偏置点;一对脊波导结构的差分反向 PN 结
射频(RF)相移器用于将调制电信号转换为调制光信号,其相位调制机理为硅波导的等离
子色散效应
[22]
;一对差分射频信号分别作用于射频相移器的上臂和下臂,上下臂的行波
电极采用的是差分微带线(简称 SS 设计方案),上下臂行波电极分别串接一个 35 Ω 的终
端电阻并连接至 VDD 引脚处,上下臂 PN 结的阴极连接在一起作为射频相移器的直流偏
置,硅光调制器正常工作时可保证 VDD 小于 PN 处的电压,这样上下臂的 PN 结始终处于
反向偏置状态。
图 1. MZ 硅光调制器(同向 MPD 和反向 MPD)的模型图
Fig. 1. Model diagram of MZ silicon optical modulator (inphase-MPD and outerphase-
MPD)
下载图片 查看所有图片
基于图 1 所示的模型图可以得到 MZ 硅光调制器输出光场的复振幅,其表达式为
剩余14页未读,继续阅读
2021-02-27 上传
2023-03-22 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传
2022-03-08 上传
2022-07-11 上传

罗伯特之技术屋
- 粉丝: 4410
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
