改进的惯性/地磁组合导航技术:提高精度的新匹配策略
需积分: 5 64 浏览量
更新于2024-08-04
收藏 316KB PDF 举报
惯性/地磁组合导航技术研究(Inertial/Magnetic Navigation System Integration)是一项重要的技术,它旨在提高导航系统的精度和鲁棒性,尤其是在地磁导航系统(Geomagnetic Navigation System, GNS)的应用中。传统地磁导航系统主要依赖于图匹配技术,但其精度受限于地图匹配算法的局限性,特别是在复杂环境或地理位置变化较大的情况下。
针对这一问题,本文由晏登洋、任建新和宋永军两位专家合作,提出了一个新的匹配方法。他们将传统的地磁导航系统与惯性导航系统(Inertial Navigation System, INS)相结合,利用惯性传感器(如加速度计和陀螺仪)测量的运动数据与地磁数据互补。具体来说,他们将磁偏角(Geomagnetic Declination)和磁倾角(Geomagnetic Inclination)作为关键的匹配参数,通过这些参数获取初始的粗略位置信息。这种方法允许系统更有效地处理地形变化带来的影响,因为地磁场强度的计算提供了更精确的位置信息。
在获取粗略位置后,结合精确的时间同步,可以获得速度信息。接下来,系统将地磁系统和惯导系统获取的速度和位置信息进行比较,形成一个量测值。这个过程利用卡尔曼滤波算法(Kalman Filter),这是一种数学优化方法,用于估计和减小导航系统中的误差。通过这种方式,系统能够实时估计并校正惯导系统的误差,从而提高整体导航系统的性能。
作者们在MATLAB环境中进行了仿真验证,结果显示,他们的新方案显著提高了地磁导航系统的精度,能够在多种场景下提供可靠的位置和速度信息。这种集成方案对于航空航天、海洋探测、自动驾驶等领域具有重要的应用价值,因为它能够在没有外部参考信号(如GPS)的情况下,增强导航系统的自主性和可靠性。
本文的关键词包括地磁场模型、地磁导航系统、磁偏角、磁倾角,以及中图分类号TP319和文献标识码A,表明了该研究属于导航技术领域的理论探讨和技术进步,文章编号1001-2257(2007)01-0019-04,显示了该研究成果发表于2007年,并且是第一作者的研究成果。通过本文,我们可以了解到如何有效地将惯性导航与地磁导航的优势结合起来,以提升导航系统的综合性能。
惯性牤地磁组合导航技术研究
晏登洋
1
任建新
1
宋永军
2
1 西北工业大学自动化学院 陕西 西安 710072 2 海军航空工程学院 山东 青岛 266041
Investigation on INS牤GNS Integ rated N avigation System
YAN Dengyang
1
REN Jianxin
1
SONGH Yongjun
2
1 N or thw estern Po lytechnical U niv ersity Depa rtment of A utomatic Contr olXi an 710072China
2 N av al A ero nautical Enginee ring Academy Q ing dao 266041China
摘要 针对此前地磁导航系统完全采用图匹配
方式的精度问题 改进了惯性牤地磁匹配组合方案
提出了一种新的匹配方法 该方法以磁偏角和磁倾
角作为匹配参数进行图匹配 获取粗位置信息 以地
磁场模型解算地磁场强度的方式来得到精确位置信
息 辅以精确计时进而获得速度信息 以地磁系统获
取的速度 位置信息与惯导系统输出的速度 位置信
息的差值作为量测值 经过卡尔曼滤波 估计导航系
统的误差 然后对惯导系统进行校正 在 M atlab 环
境下的仿真证实了该方案可以达到较高精度
关键词 地磁场模型 地磁导航系统 磁偏角 磁
倾角
中图分类号 TP319
文献标识码 A
文章编号10012257200701001904
收稿日期 20060614
Abstract M ainly focuses on the precision o f
geomag netic naviga tion sy st em GNSw hich only
used in map m ode develops the integrated scheme
usi ng IN S牤G N S and presents a new m atching
mode T he scheme uses geom agnetic declinatio n
and g eo magnetic inclination as matching pa rame
ters t o acquire rough position T hen the accurate
positio n is o btained from calculating geom ag net ic
intensi ty by geomag netic mo del The velo city is ac
quired by accurate timing The position diff erence
and the veloci ty difference of IN S and GNS are as
measurem ent s and the parame ters i s estimated u
sing Kalman filt er eliminating the error o f INS
The results o f simulatio n under M atlab show t hat
the integ rated navig atio n sy stem improves t he pre
cisio n of navi gatio n sy stem
Key wordsgeomag netic field m odel GNS geo
mag netic declination geom ag netic inclinatio n
0 引言
由于图像匹配和地形匹配技术在某些场合存在
一定缺陷 研究地磁匹配导航制导技术具有重要的
现实意义 地磁场模型与地磁图是研究地磁匹配导
航制导技术的基础 地磁场模型是地磁场的数学描
述 包括全球地磁场模型和局部地磁场模型 较为精
确的地磁场模型可以提供准确的地磁场信息 地磁
场建模和地磁图的精确程度是决定地磁匹配技术是
否可行的关键因素
犤1犦
如果把惯导与地磁匹配技术
组合使用 利用地磁匹配技术的长期稳定性弥补惯
导系统误差随时间累积的缺点 利用惯导系统的短
期高精度弥补地磁匹配系统易受干扰等不足 则可
为航空 航海以及陆地运输提供更精确的定位信息
1 地磁场模型
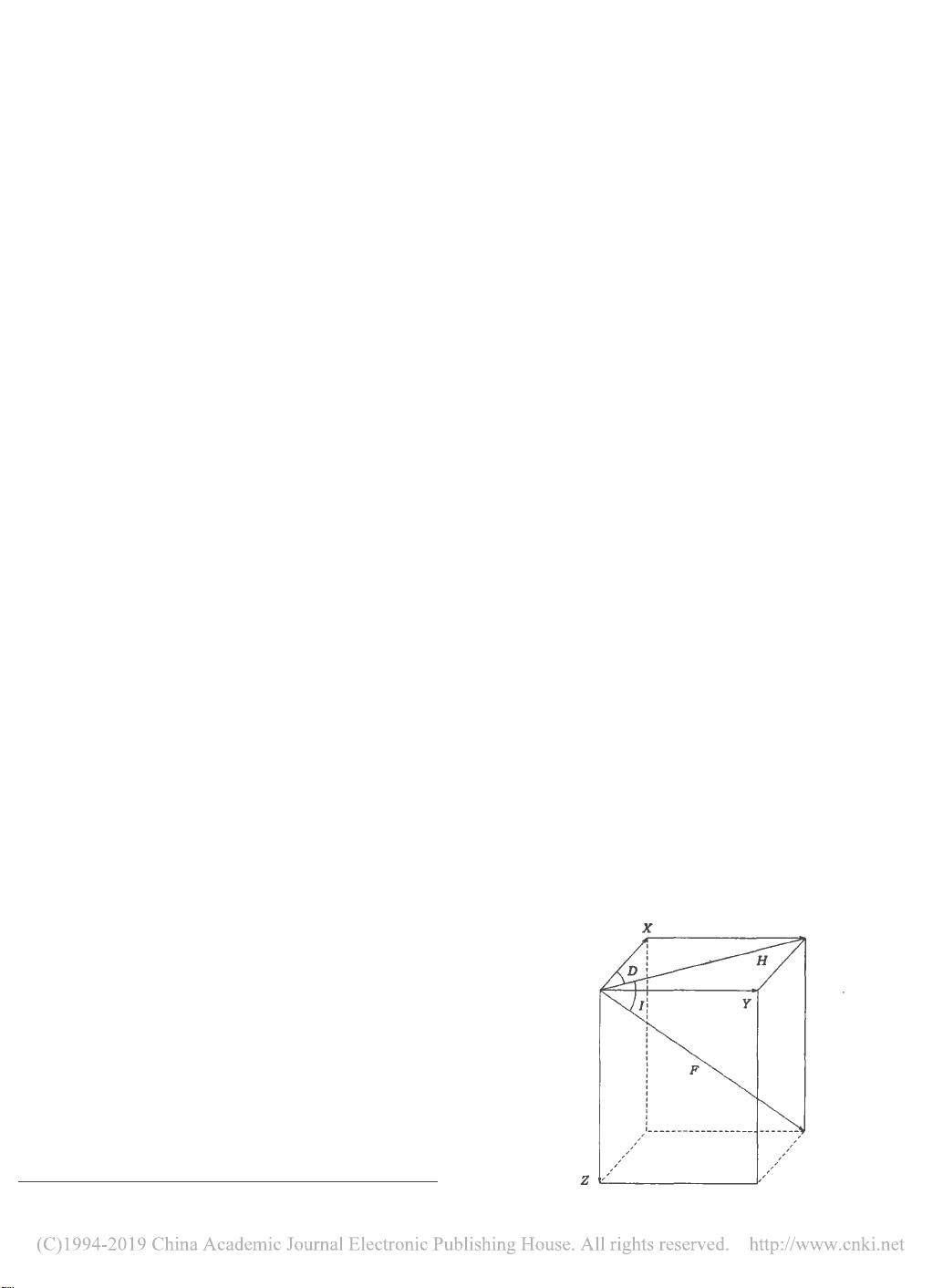
如图 1 所示 地球磁场矢量 B 可以用正交分量
图 1 地磁场各分量示意
19
机械与电子 20071
下载后可阅读完整内容,剩余3页未读,立即下载
2021-09-28 上传
2021-09-08 上传
2022-04-02 上传
点击了解资源详情
2021-09-29 上传
2021-09-08 上传
2021-09-08 上传
2013-07-11 上传
2022-07-14 上传

湘灵鼓瑟134
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
