倒立摆PID控制研究与MATLAB仿真探索
版权申诉
7 浏览量
更新于2024-07-07
1
收藏 4.01MB DOC 举报
"倒立摆PID控制及MATLAB仿真"
这篇文档深入探讨了倒立摆系统的PID控制策略及其MATLAB仿真。倒立摆系统作为一个复杂的非线性动态系统,具有高度的不稳定性和快速响应特性,因此对其进行控制研究对于控制系统理论与实践具有重要意义。作者基于实验室的一级直线倒立摆实验装置,侧重于PID控制方法的研究。
首先,文档概述了自动控制的历史发展和当前的研究状况。介绍了自动控制的基本概念,包括开环与闭环控制的区别,以及自动控制系统的不同分类,如恒值系统、随动系统、程序控制系统、随机系统、线性与非线性系统、连续与离散系统,以及单输入单输出和多输入多输出系统。此外,还讨论了控制系统的一些关键性能指标,例如稳定性和抗干扰能力,并详细描述了几种典型环节,如比例、积分、微分、惯性和时滞环节。
接下来,文档阐述了MATLAB在仿真中的应用,包括MATLAB的基础知识、仿真的概念以及在控制系统动态仿真中的具体应用。这为后续的倒立摆系统模型建立和控制策略设计提供了工具基础。
在第三章中,详细介绍了直线一级倒立摆系统的构成,包括倒立摆组件、电控箱和其他部件,分析了倒立摆的特性,并建立了数学模型。通过微分方程的推导得到传递函数和状态空间模型,最后利用MATLAB进行实际系统模型的仿真。
第四章重点讲解PID控制理论,包括PID控制的基本原理、控制规律以及数字PID控制的两种算法(位置式和增量式)。此外,还讨论了常见的PID控制系统结构,如串级PID,为实际控制设计提供了理论支持。
最后,作者在MATLAB环境中进行了大量仿真,比较了不同控制策略的效果,并在固高科技的MATLAB实时控制软件平台上对一级倒立摆系统进行了实时控制实验,研究了控制方法的实时性能和抗干扰能力。论文结尾进行了总结,并对未来可能的研究方向进行了展望。
这篇文档全面覆盖了倒立摆控制系统的理论基础、模型构建、PID控制策略和仿真验证,为读者提供了一个深入理解倒立摆控制的综合视角。
湖南工业大学本科生毕业设计
(1.4)
其中积分环节的方框图如图1.4所示
图 1.4 积分环节方框图
积分环节的特点是,输出量与输入量对时间的积分成正比。若输入突变,输出值
要等时间T之后才等于输入值,故有滞后作用。输出积累一段时间后,即使使输入为
零,输出也将保持原值不变,即具有记忆功能。只有当输入反向时,输出才反向积分
而下降。常利用积分环节来改善系统的稳态性能。
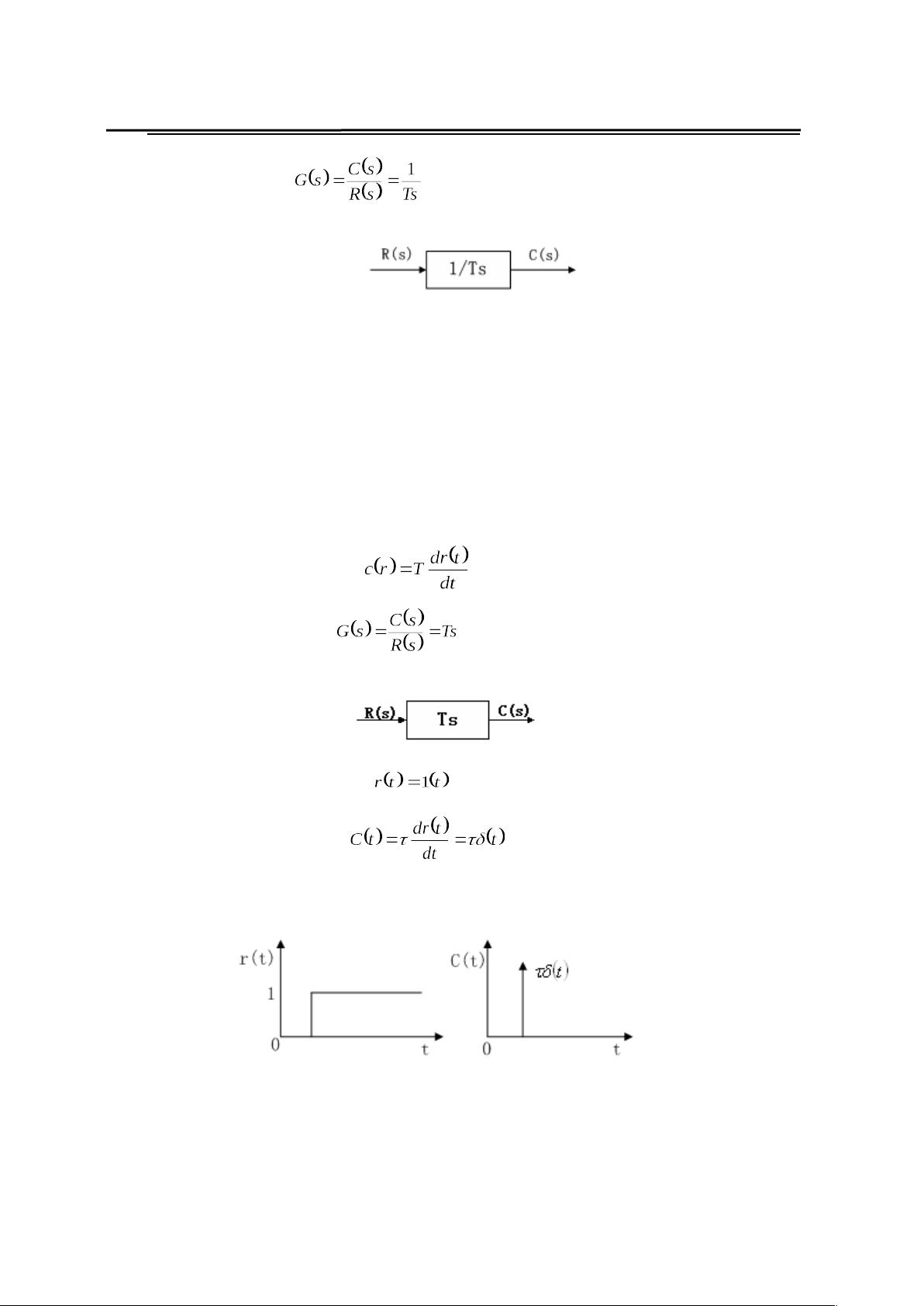
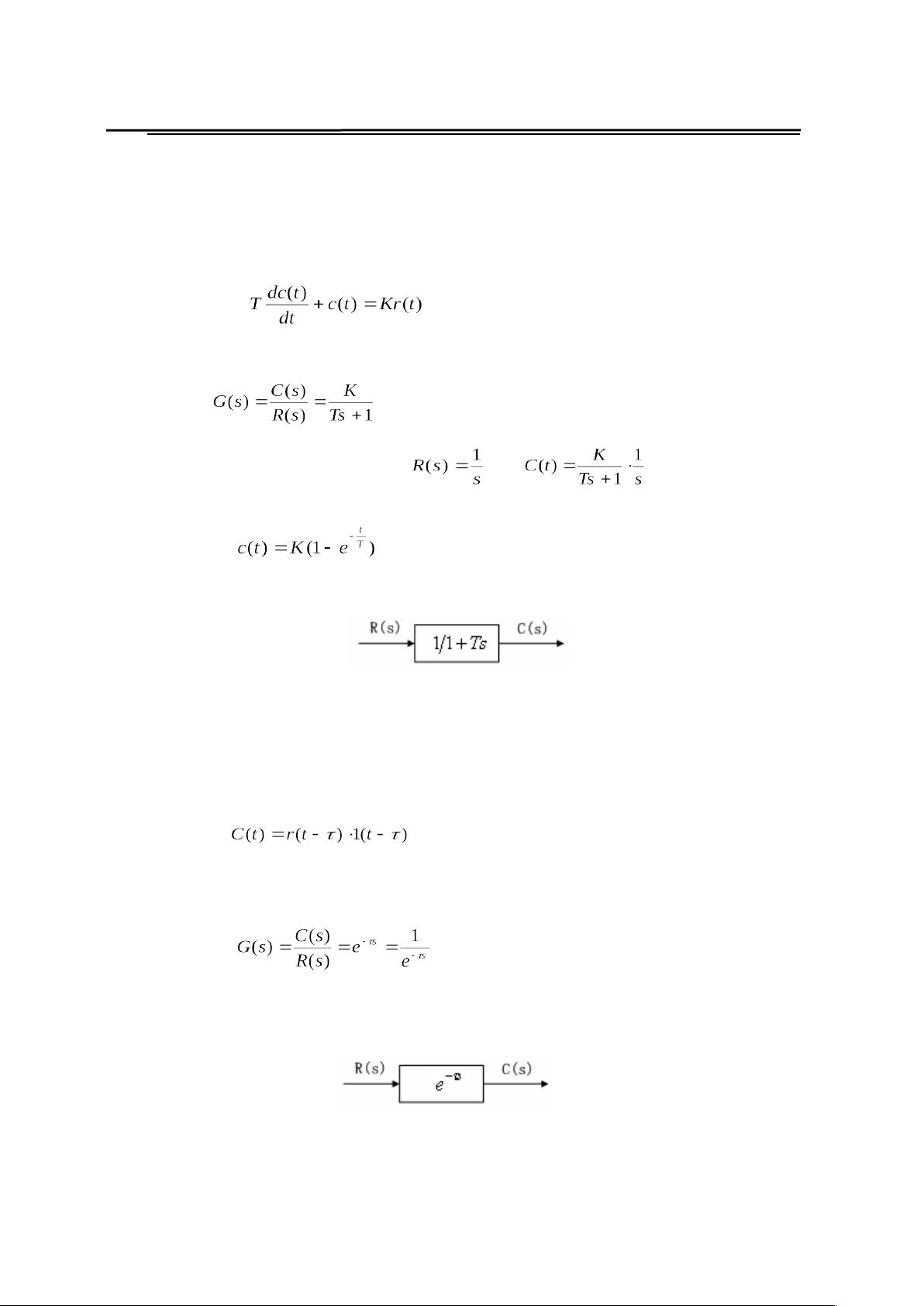
1.4.3 微分环节
理想的微分环节的微分方程为
(1.5)
其中T为微分时间常数。
对微分方程取拉氏变换后,可求得传递函数
(1.6)
理想的微分环节的方框图如图1.5所示
图 1.5 微分环节方框图
若输入为单位阶跃信号,即 ,则输出的单位阶跃响应为
(1.7)
这是一个面积为τ的脉冲,脉冲宽为零,幅值为无穷大,理想微分环节的输入和
输出如图1.6所示。
图 1.6 理想微分环节的单位阶跃响应
微分环节的特点是,其输出与输入信号对时间的微分成正比,即输出反映了输入
信号的变化率,而不反映输入量本身的大小。因此,可由微分环节的输出来反映输入
5
剩余42页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
159 浏览量
147 浏览量
112 浏览量
2022-07-17 上传
156 浏览量
2022-06-26 上传

猫一样的女子245
- 粉丝: 233
 我的内容管理
展开
我的内容管理
展开







最新资源
- dreamwave入门自学教程:从零基础开始
- 快速搭建SpringMVC项目无需额外下载jar包
- 轻松掌握:实用HTML入门小例子
- GNU Linuxthreads 2.0.1版本核心库发布
- Kotlin Android App开发:TalkinKotlin播客平台
- Ruby库niceql:简化彩色SQL格式输出的实用工具
- Laravel框架介绍与学习资源分享
- C#实现流程图设计器:随意拖动与连线
- 成功导出Excel:整理POI依赖包的心路历程
- STM32G0系列器件安装包发布,Keil支持新升级
- 2015版Android五子连珠完整源码下载
- KdGaugeView:定制化的Android仪表盘控件
- GNU项目新版本glibc-libidn-2.3.5发布
- 建筑物整体刚性防水系统新技术研究
- 网站开发实践:CSS样式设计与优化
- C#实现WebQQ协议模拟登录教程
