LQR与PID在单级倒立摆控制中的比较分析
143 浏览量
更新于2024-09-10
3
收藏 369KB PDF 举报
"这篇文章对比了LQR控制与PID控制在单级倒立摆系统中的应用,探讨了两种控制策略的设计原理和仿真实验结果。LQR控制作为线性二次型最优控制,具有广泛的适用性和解析解的优势,而PID控制则历史悠久,应用广泛。"
正文:
在控制理论与应用领域,LQR控制与PID控制是两种常见的控制策略。LQR控制基于状态空间模型,旨在优化系统的性能指标,通常用于设计动态控制器。这种控制方法的特点在于其通用性,不仅适用于各种物理系统,而且能够提供线性反馈结构和解析解,简化了控制器的设计过程。
相比之下,PID控制是一种传统的控制方法,由比例(P)、积分(I)和微分(D)三个部分组成。PID控制的吸引力在于其简单易用和适应性强,适用于多种工业过程控制,尤其在单变量、非时变系统中表现突出。然而,与LQG控制相比,PID控制可能需要更多的调整参数来达到最优性能。
文章中提到,研究者对单级倒立摆这一复杂系统进行了控制仿真实验,分别采用了LQR和PID控制器。倒立摆系统因其非线性、不稳定特性,成为了控制理论研究的理想模型。通过对比两种控制器在该系统上的表现,可以更深入地理解它们的优缺点。
LQR控制器的设计通常涉及解决一个二次型优化问题,目标是最小化系统状态的加权平方和。这需要计算系统的传递函数或状态空间模型,然后通过Riccati方程求解控制器增益矩阵。LQR控制通常能提供优良的稳态性能和快速的动态响应,但可能对系统参数变化敏感。
而PID控制器的设计相对直观,主要通过调整三个比例系数来平衡系统的响应速度、稳态精度和抗干扰能力。PID控制在实际应用中具有良好的鲁棒性,但可能无法达到LQR控制那样的性能优化。
通过MATLAB仿真,研究者分析了两种控制器在控制倒立摆稳定性和跟踪性能方面的差异。这些实验结果有助于评估在特定应用场景下,LQR和PID控制的适用性。文章指出,尽管LQR控制在理论上具有优势,但在实际应用中,由于PID控制的简便性和广泛的经验支持,它仍然是很多控制系统首选的控制策略。
LQR控制和PID控制各有特点,选择哪种控制策略取决于具体的应用需求和系统特性。LQR控制适合对性能有严格要求且系统模型已知的情况,而PID控制则在简单系统和需要快速实现控制效果的场合更为实用。这篇研究对于理解和比较这两种控制方法提供了有价值的参考。
控制理论与应用
Q垒垒!!Q!!b金Q!Y曼Qg垒巳巳!l垒垒!lQD§
《自动化技术与应用》2007年薨26卷第l期
L
Q
R控制与P
I
D控制在单级倒立摆中的对比研究
刘瑕.梁昔明
(中南大学信息科学与工程学院,湖南长沙410083)
摘要:本文在单级倒立摆系统模型的基础上,介绍设计LQR控制器和PID控制器的基本原理,并通过对单级倒立摆系统的控制仿真
实验对比研究两种控制方法,给出了相应的结论。
关键词:LQR控制;PID控制;倒立摆;MATLAB仿真
中图分类号:TPl3
文献标识码:A
文章编号:1003
724l(2007)0卜0013
03
COmpa
risOn
Study
Of
LQR
and
PI
D
COntrOI
On
a
SingIe
InVerted
PendUIum
LIU
Jing,LIANG
Xi-ming
(school
of
hIfolmation
science
aIld
EIlgiIleedng,Cen缸al
sou血UmV喇哆,CllaIlgsha
410083,ctliIla)
Abstract:This
paper
presents
the
basic
principIes
for
designing
LQR
controlIer
and
PID
controIler.SimuIation
tests
of
these
two
methods
on
a
single
inVerted
pendulum
system
are
giVen.
Key
words:LQR
control,PID
control,invened
pendulum,MATLAB
simulation
1引言
线性二次型最优控制设计是基于状态空间技术设计一个优
化的动态控制器。线性二次型调节器【1,2,3】(Linear
Quadratic
Re目1】ato卜_I
QR)问题在现代控制理论中占有非常重要的位置,
受到控制界的普遍重视,这是因为它的提法具有普遍意义,它不局
限于某种物理系统,而且人们经过许多试探,证明这样的提法易于
获得解析解,最为可贵的是能获得线性反馈的结构,并且它提供了
一种统一的框架,把经典设计(单变量,非时变)也统一于其中。然
而,和人们熟知的PID控制理论相比,LQR应用范围要小得多。
PID控制【3.4J是自动控制中产生最早、应用最广的一种控制方法。
PID控制在实际控制工程中应用最广,据不完全统计,在工业过程
控制,航空航天控制等领域中,PID控制的应用占80%以上。这是
因为PID控制器结构简单,软硬件实现方便、快速,便于调节,有
较好的控制效果并目.对模型误差有较好的鲁棒陛。
本文在单级倒立摆系统的基础上,具体对比研究这两种控制
方法。在下面的第二节将介绍单级倒立摆的数学模型;第三节介
绍LQR控制器和PID控制器的设计方法;第四节进行LQR控制器
和PID控制器在单级倒立摆系统下的仿真研究;最后总结本文并
给出结论。
收稿日期:2
0
06—0
5一l 2
2倒立摆的数学模型
倒立摆系冽1’习的控制问题被公认为控制理论中的一个典型
问题,许多新的实时控制理论都经过倒立摆控制实验来加以验证。
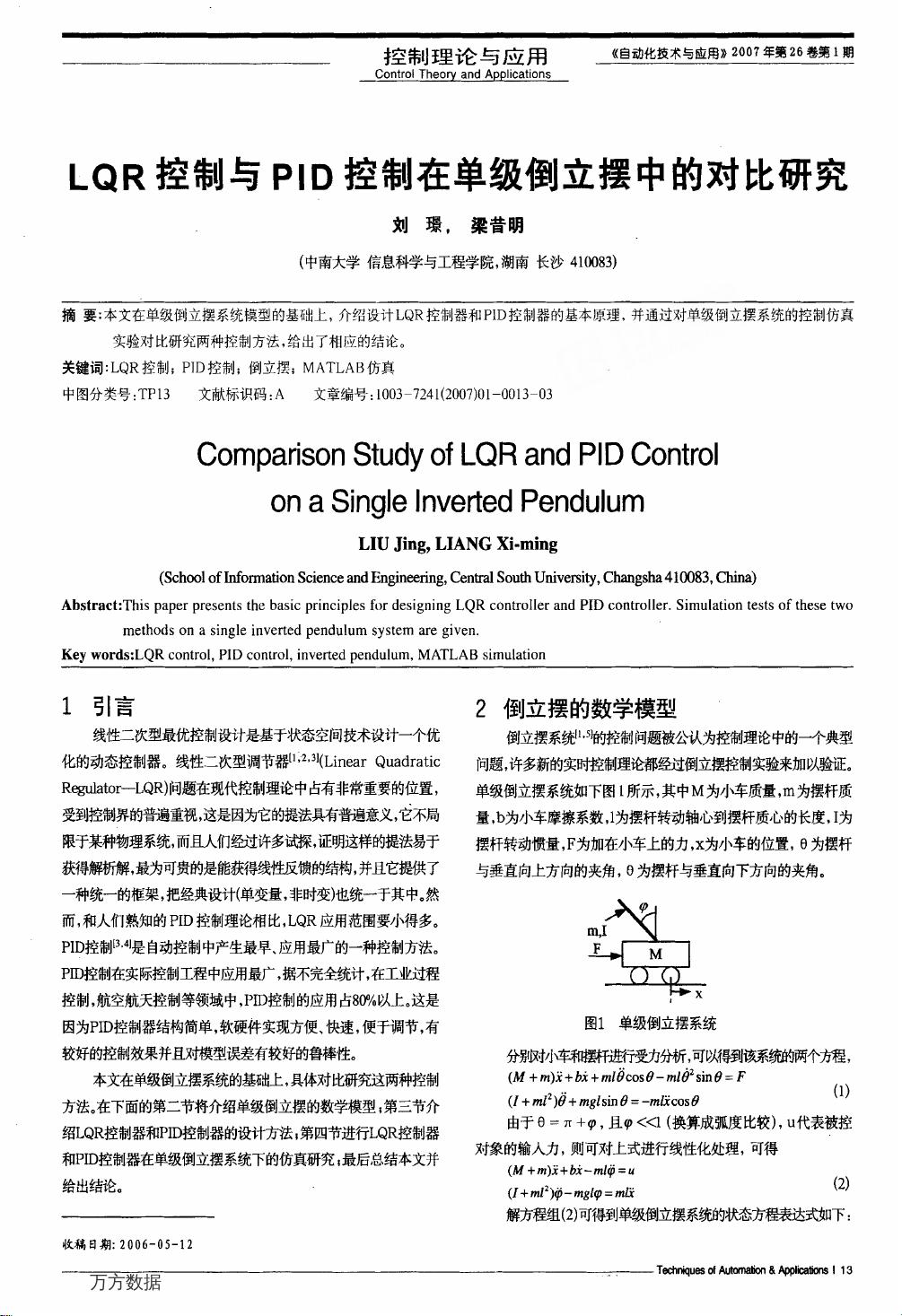
单级倒立摆系统如下图l所示,其中M为小车质量,m为摆杆质
量,b为小车摩擦系数,1为摆杆转动轴心到摆杆质心的长度,I为
摆杆转动惯量,F为加在小车上的力,x为小车的位置,e为摆杆
与垂直向上方向的夹角,9为摆杆与垂直向下方向的夹角。
图1单级倒立摆系统
分男收寸,j嘻琅曜籽进行受力分析,可以删该系统的两个方程,
(M+m)量+撕+,行f舀cos口一mz毋2
sinp=F
,1、
(,+小z2)痧+m∥sin侈=一m饯cos矽
、1
7
由于0=丌+妒,且9<<l(换算成弧度比较),u代表被控
对象的输入力,则可对上式进行线性化处理,可得
Ⅲ+m)置+城一m坤~
㈨
(,+mf2)舻一棚苫却=m反
、‘7
解方程组(2)可得到单级倒立摆系统的状态方程表达式如下:
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
2020-02-11 上传
2019-08-12 上传
2021-09-10 上传
2021-10-15 上传
2021-12-02 上传
2022-07-08 上传
2021-10-04 上传
2022-05-12 上传

你我岁月
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
