Copley驱动器中文调试详指南:从安装到高级设置
本篇文档是关于Copley驱动器的详细调试指南,中文版,特别适用于马达驱动器的调试工作。它详细介绍了Copley CME2调试软件的安装、启动以及各种配置步骤,涵盖了基本设置、电机/反馈参数、数字输入/输出、电机相位调整、控制面板功能、控制环路调试、驱动器错误处理和命令输入等多个关键环节。
1. **软件安装与启动**:
- 用户手册首先讲解了CME2软件的安装方法,包括下载和安装过程,确保软件在正确的环境中运行。
- 启动软件后,用户需进行串口设置和CAN网络参数配置,以便于驱动器的通信。
2. **基本配置**:
- 包括基本设置的修改,如修改时间、日期等,以及ServoTube电机的配置,这是确保电机正常工作的基础。
3. **电机/反馈参数配置**:
- 文档深入阐述了电机参数(如旋转和直线电机)的设置,涉及电机速度、电流、电压等关键参数,以及反馈参数的调整,如编码器的配置和注意事项。
4. **数字输入/输出**:
- 数字I/O的配置包括输入信号的检测和输出控制,同步PWM开关频率的选择,有助于实现精确的控制。
5. **电机相位调整**:
- AutoPhase和MotorPhaseManually两种方法用于自动和手动整定电机相位,以优化性能和消除潜在问题。
6. **控制面板与控制环路**:
- ControlPanel提供了直观的界面,展示状态信息、监控通道和多种控制模式,如Jog模式,以及电流、速度和位置环的设置、调试和注意事项。
7. **驱动器错误处理**:
- 对常见的驱动器错误,如错误参数、锁定和位置速度误差,提供了诊断和配置方法,帮助用户解决可能遇到的问题。
8. **命令输入方式**:
- 文档详述了模拟命令、PWM输入、数字位置输入和软件编程输入的设置,为高级控制提供了多样化手段。
9. **CAN网络配置**:
- 说明了如何配置Copley驱动器与CAN网络通信,确保数据传输的稳定性和效率。
10. **回原点功能**:
- 提供了关于如何让驱动器回到零位的指导,这对于定位系统和初始化操作至关重要。
这篇Copley驱动器调试指南是一份实用且全面的工具,对于工程师在实际操作中遇到的各种调试问题提供了详尽的解答和步骤。通过理解和遵循这些指南,用户能够更有效地管理和优化Copley驱动器的性能。
14
3.电机/反馈参数配置
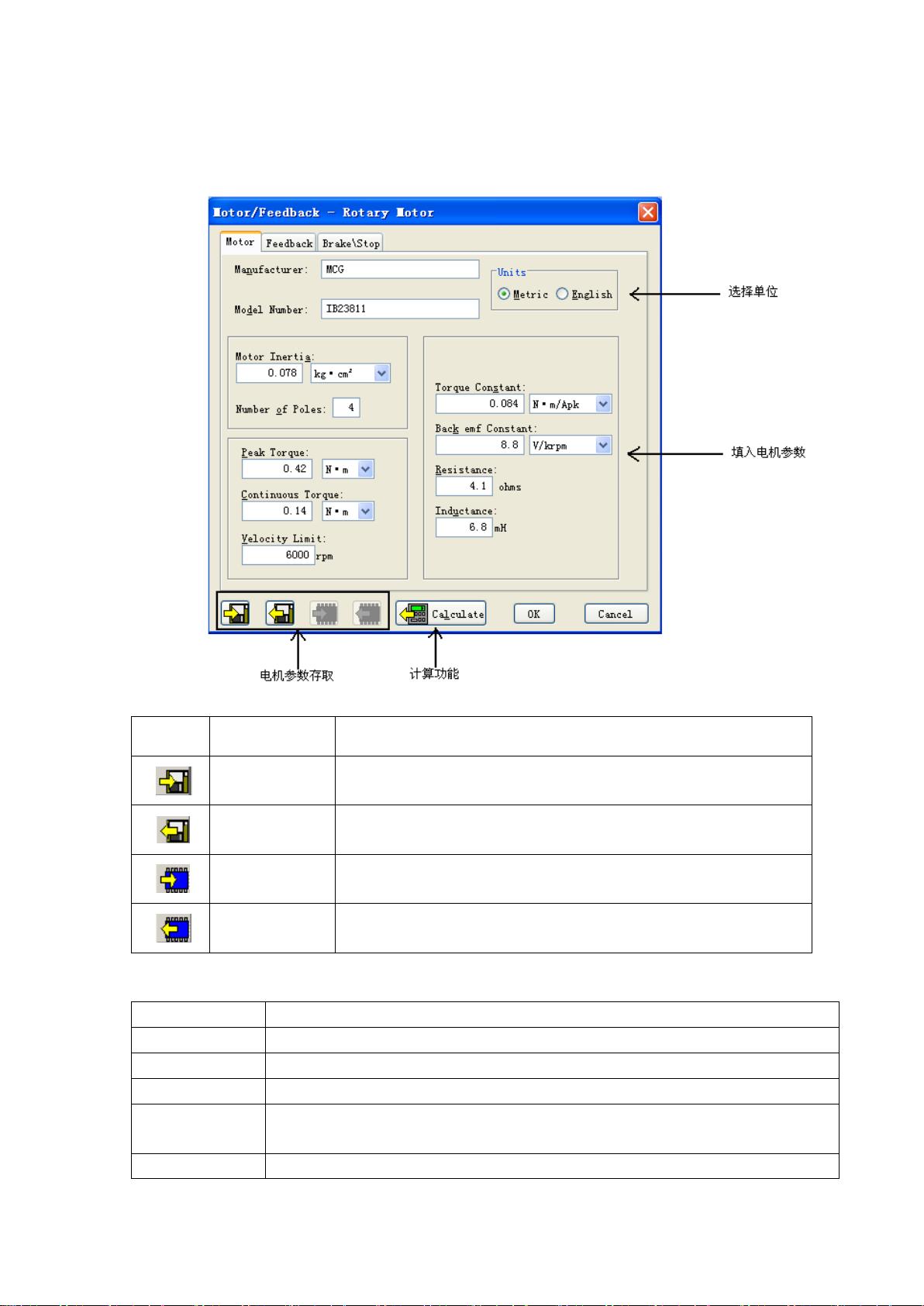
3.1 电机/反馈参数窗口概览
电机/反馈参数可以通过下表中的图标读取或存入电脑的磁盘中
图标
名称
描述
Save motor data
to disk
将电机/反馈/刹车的设置以.ccm 文件的格式保存到磁盘中
Restore motor
data from disk
从电脑中读取.ccm 格式的文件到驱动器中
Save motor data
to flash
将电机/反馈/刹车的设置保存到驱动器的 flash 中
Restore motor
data from flash
从 flash 中读取电机/反馈/刹车的设置
3.2 旋转电机参数设置
设置
描述
Manufacturer
电机生产商名称
Model Number
电机型号
Units
参数单位:英制 或 公制
Motor Inertia
电机惯量 用于计算初始的速度环调试参数。范围:0.00001 到 4.294kg cm^2.
默认值:0.00001kg cm^2
Number of poles
(仅指无刷电机) 电机中的磁极数,用于电机的整定。范围:2到200 默
剩余83页未读,继续阅读
1836 浏览量
点击了解资源详情
点击了解资源详情
316 浏览量
806 浏览量
点击了解资源详情
点击了解资源详情

ray9901
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







