X射线、相机与CT标定方法比较与效率评估
需积分: 3 122 浏览量
更新于2024-09-08
收藏 1.81MB PDF 举报
本文主要探讨了在常规诊断X射线成像系统中应用的三种不同的标定方法:直接线性变换(DLT)、张量法(Zhang method)以及Tsai方法。这些技术对于获取成像设备的内在参数(如焦距、畸变系数等)和外在参数(如投影矩阵、旋转和平移)至关重要,从而确保图像的准确性和一致性。
DLT是一种基于像素级匹配的简单但直观的方法,它通过在三维空间中找到对应的二维投影点来计算投影矩阵。然而,这种方法可能对大规模数据处理和精确度有较高的要求,因为依赖于图像中的特征点匹配。
Zhang方法,也称为结构从运动(Structure from Motion)技术,利用连续拍摄的图像序列来估计相机的运动参数和内部参数。这种技术更适用于动态场景,因为它能利用序列信息来增加标定的稳定性。但是,它可能需要足够的图像帧数和稳定的运动模式才能获得良好结果。
Tsai方法结合了内在参数和外在参数的联合标定,通过解析几何和矩阵运算,能够同时解决相机参数和目标空间坐标系之间的关系。这种方法通常计算效率较高,但可能会涉及到更为复杂的数学模型和计算过程。
作者们开发了一个初始的三维校准框架,其中包含特定位置的T形标志点,用于实验研究。他们提出了一套评估标准,包括检测器像素密度的计算,这个指标可以反映标定方法的精度和效率。通过比较这些技术在实际放射摄影中的表现,研究人员希望能够确定哪种方法最适合于临床诊断X射线成像系统的需求。
这篇文章深入分析了在X射线标定过程中,不同的方法在理论背景、操作流程和性能指标上的区别,并提供了实证研究的结果,这对于优化X射线成像系统的稳定性和图像质量具有重要意义。对于从事医学影像技术或机器视觉领域的专业人士来说,理解和掌握这些标定方法是提升设备性能和图像处理能力的关键。
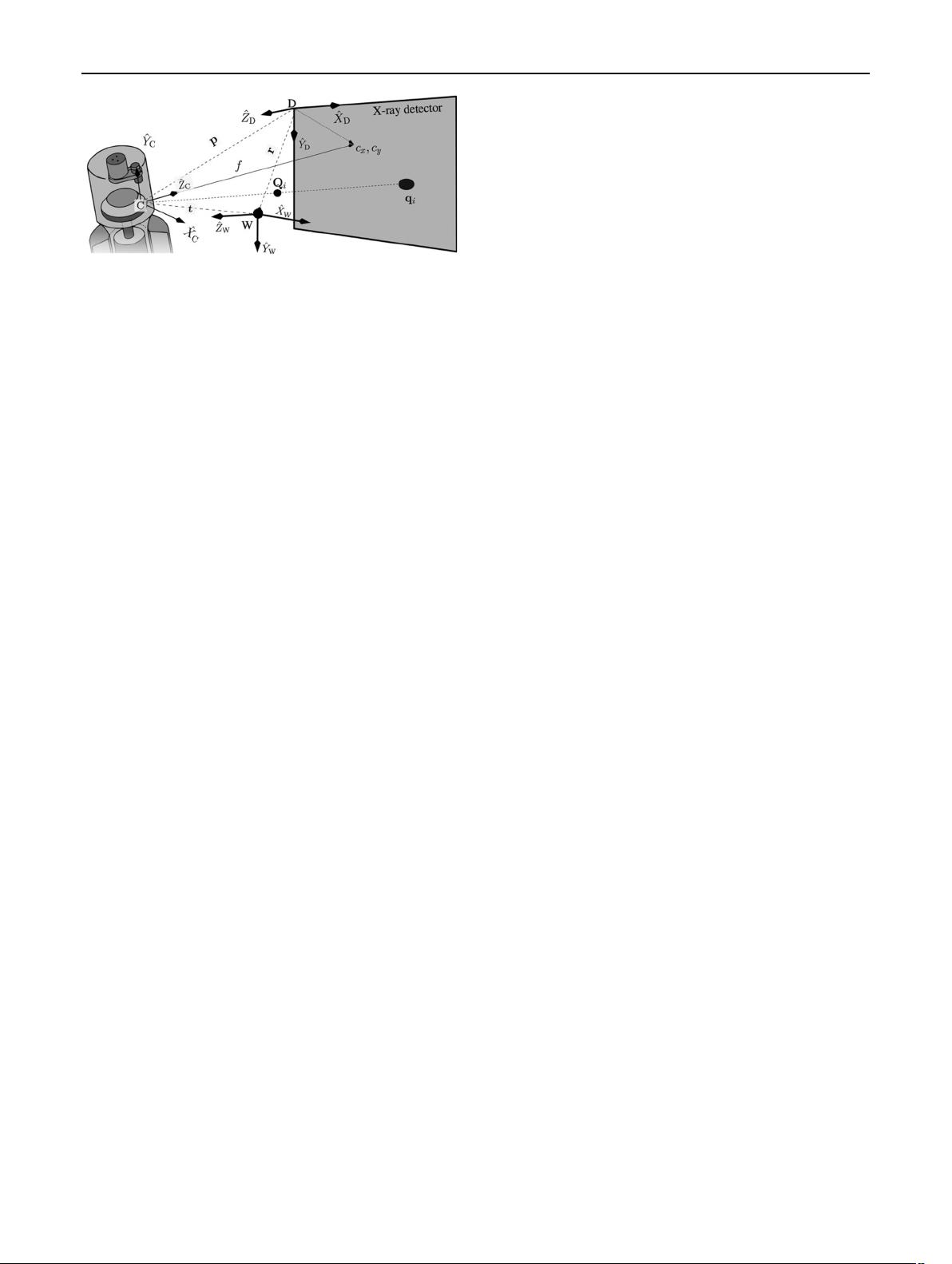
usually placed at a known 3D point in the radiogr aphed
scene, typically, over a frame or DUT. The second one is
the coordinate frame attached to the detect or plate itself,
D ¼
^
X
D
;
^
Y
D
;
^
Z
D
, whose origin is normally coincident
with the upper leftmost pixel. The need to define the
D system originates from the physical fact of working with
a radiation-responsive layer that is not tied to C and from
the possibility of moving the anode and/or detector with
complete freedom around the object in the world coordi-
nate system. Finally, the coordinate system C ¼
^
X
C
;
^
Y
C
;
^
Z
C
has its origin in C itself.
Any point X in the 3D space can be associated with any
of the aforementioned reference frames. For instance, if X
C
represents the coord inates of X relatively to C and X
D
is its
representation relat ively to D, then, from Fig. 2, it can be
verified that:
X
D
¼
10 0
0 10
001
0
@
1
A
|fflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflffl}
p rotation about
^
X
C
X
C
þ p ð1Þ
where p = (c
x
, c
y
, f) is known as the principal point and
represents the coordinates of C in D. The line that passes
through C and is perpendicular to the detector plane is the
principal axis and intersects the image plane at the point
(c
x
, c
y
, 0). The distance between C and the detector plane is
the focal length f. The anode C can also be expressed in W
coordinates by means of vector t, which starts at the origin
of W and ends at C.
Finally, if t and p are known, we can derive vector r:
r ¼ p t ð2Þ
which connects the W and D reference frames.
2.3 Camera calibration and projection matrices
As discussed above, a prerequisite for any application in
the field of computer vision is the calibration of the camera.
This step is necessary to determine the pose between the
imaging system and real-world objects. This calibration
involves the calculation of five intrinsic (internal) and six
extrinsic (external) parameters, which can be grouped into
a39 4 matrix, the camera projection/calibration matrix P.
Mathematically, P maps 3D points—expressed in W
coordinates—to 2D points using the expression:
^
q
i
¼ P
^
Q
i
, where each
^
q
i
is an image point and
^
Q
i
is a
W-referenced point, both expressed in homogeneous
coordinates.
As mentioned above, P can be decompos ed into two
blocks of intrinsic (K) and extrinsic parameters. The K
transformation matrix projects 3D points expressed in
terms of the D reference frame to their corresponding
image location on the same reference frame:
K ¼
a
x
sx
0
0 a
y
y
0
001
0
@
1
A
¼
k
x
00
0 k
y
0
001
0
@
1
A
|fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl}
k
f r c
x
0 fc
y
00 1
0
@
1
A
ð3Þ
where k is a resolution matrix (described above) expressing
the number of pixels per unit length for both x and y axes,
and a
x
= fk
x
and a
y
= fk
y
represent the focal lengths in
pixel units. Similarly, x
0
and y
0
are the counterparts of c
x
and c
y
in image units. The parameter s is the skewness of
the camera and defines the angle between the x and y axes.
However, as stated above, we assume that pixels are
square, which allows us to simplify Eq. (3) as:
K ¼
a 0 x
0
0 a y
0
00 1
0
@
1
A
ð4Þ
where we have set both focal lengths to be equal to a (this
can generally be assumed in the field of X-ray imaging).
However, this hypothesis should be used with caution in
the case of CR plates, in which the IP scanning process has
its own optical oddities and limitations, as explained by
Rowlands [12] and Dobbins et al. [13].
The extrinsic parameters describe a rigid transformation
that maps points in space between the W and C frames.
This matrix can also be decomposed into a rotation matrix
R (accounting for angles h
x
, h
y
, h
z
) and the translation
vector t described earlier:
½Rjt
zffl}|ffl{
extrinsic matrix
¼ I tðÞ
|fflfflffl{zfflfflffl}
3D translation
R0
01
|fflfflfflfflfflffl{zfflfflfflfflfflffl}
3D rotatio n
zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{
extrinsic matrix
: ð5Þ
A given P can be decomposed into its intrinsic/extrinsic
parts using an RQ decomposition, as suggested by Hartley
[14], because R is orthogonal and K has an upper triangular
shape:
Fig. 2 World (W), detector (D), and anode (C) reference frames. A
Q
i
object is shown in W frame, together with its corresponding
projection q
i
in the D system and relative to the C reference frame
70 F. Albiol et al.
剩余13页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

pfrules
- 粉丝: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网狐工具:核心DLL和程序文件解析
- PortfolioCVphp - 展示JavaScript技能的个人作品集
- 手机归属地查询网站完整项目:HTML+PHP源码及数据集
- 昆仑通态MCGS通用版S7400父设备驱动包下载
- 手机QQ登录工具的压缩包内容解析
- Git基础学习仓库:掌握版本控制要点
- 3322动态域名更新器使用教程与下载
- iOS源码开发:温度转换应用简易教程
- 定制化用户登录页面模板设计指南
- SMAC电机在包装生产线应用的技术案例分析
- Silverlight 5实现COM组件调用无需OOB技术
- C#实现多功能画图板:画直线、矩形、圆等
- 深入探讨C#语言在WPF项目开发中的应用
- 新版2012109通用权限系统源码发布:多角色用户支持
- 计算机科学与工程系网站开发技术源码合集
- Java实现简易导出Excel工具的开发教程
