MATLAB相机标定结果在图像处理和计算机视觉中的应用:探索标定结果的价值
发布时间: 2024-06-08 18:31:51 阅读量: 14 订阅数: 21 
# 1. MATLAB相机标定**
相机标定是确定相机内参和外参的过程,对于图像处理和计算机视觉应用至关重要。MATLAB提供了丰富的工具箱和函数,用于执行相机标定任务。
在MATLAB中,相机标定通常涉及以下步骤:
- **获取图像:**使用相机拍摄一系列图像,这些图像包含具有已知几何形状的标定图案。
- **检测角点:**在图像中检测标定图案上的角点,这些角点用于计算相机内参。
- **计算内参:**使用角点坐标和标定图案的几何信息,计算相机的内参,包括焦距、主点和畸变系数。
- **计算外参:**如果已知标定图案在世界坐标系中的位置,则可以使用角点坐标和内参计算相机的位姿和外参。
# 2. 相机标定结果在图像处理中的应用**
相机标定结果在图像处理中具有广泛的应用,因为它可以提供有关相机内部参数和外部参数的准确信息。这些信息对于纠正图像失真、增强图像质量和进行几何变换至关重要。
**2.1 图像校正和几何变换**
图像校正和几何变换是图像处理中常见的任务,它们涉及修改图像的几何形状以获得所需的视角或形状。相机标定结果可以为这些任务提供必要的参数。
**2.1.1 透视变换**
透视变换是一种几何变换,它将图像中的平行线投影到一个会聚点。它通常用于纠正透视失真,例如当相机以一定角度拍摄平面物体时发生的失真。
**代码块:**
```python
import cv2
import numpy as np
# 定义透视变换矩阵
H = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]])
# 读取图像
image = cv2.imread('image.jpg')
# 应用透视变换
warped = cv2.warpPerspective(image, H, (image.shape[1], image.shape[0]))
# 显示结果
cv2.imshow('Original', image)
cv2.imshow('Warped', warped)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.warpPerspective()` 函数使用透视变换矩阵 `H` 将图像 `image` 转换为 `warped` 图像。
* 透视变换矩阵 `H` 定义了透视变换的平移、旋转和缩放参数。
* `cv2.imshow()` 函数显示原始图像和透视变换后的图像。
**2.1.2 仿射变换**
仿射变换是一种更通用的几何变换,它允许图像中的对象进行平移、旋转、缩放、剪切和倾斜。它广泛用于图像配准、图像拼接和图像变形。
**代码块:**
```python
import cv2
import numpy as np
# 定义仿射变换矩阵
M = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]])
# 读取图像
image = cv2.imread('image.jpg')
# 应用仿射变换
warped = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))
# 显示结果
cv2.imshow('Original', image)
cv2.imshow('Warped', warped)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.warpAffine()` 函数使用仿射变换矩阵 `M` 将图像 `image` 转换为 `warped` 图像。
* 仿射变换矩阵 `M` 定义了仿射变换的平移、旋转、缩放、剪切和倾斜参数。
* `cv2.imshow()` 函数显示原始图像和仿射变换后的图像。
**2.2 图像增强和降噪**
图像增强和降噪是图像处理中常用的技术,它们可以改善图像的视觉质量和可读性。相机标定结果可以为这些技术提供有关图像亮度和噪声分布的信息。
**2.2.1 直方图均衡化**
直方图均衡化是一种图像增强技术,它通过调整图像的像素值分布来改善图像的对比度。它可以使暗图像变亮,亮图像变暗,从而提高图像的整体可视性。
**代码块:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 应用直方图均衡化
equ = cv2.equalizeHist(image)
# 显示结果
cv2.imshow('Original', image)
cv2.imshow('Equalized', equ)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.equalizeHist()` 函数对图像 `image` 进行直方图均衡化,生成均衡化后的图像 `equ`。
* 直方图均衡化通过调整图像的像素值分布来改善图像的对比度。
* `cv2.imshow()` 函数显示原始图像和均衡化后的图像。
**2.2.2 中值滤波**
中值滤波是一种图像降噪技术,它通过替换每个像素的值为其周围像素值的中值来去除图像中的噪声。它可以有效地去除孤立的噪声点和椒盐噪声。
**代码块:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 应用中值滤波
denoised = cv2.medianBlur(image, 3)
# 显示结果
cv2.imshow('Original', image)
cv2.imshow
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MATLAB 相机标定的原理、实践和应用。从理论基础到实战指南,它提供了全面而深入的知识。专栏涵盖了标定参数的揭秘、误差分析、工具箱使用指南以及在图像处理、机器人视觉、医学影像、工业检测、无人驾驶、虚拟现实、增强现实、人脸识别、手势识别、动作捕捉和生物特征识别等领域的应用。通过深入理解相机标定技术,读者可以提升标定精度,优化标定流程,并探索标定结果在各种领域的价值,从而为计算机视觉和图像处理应用提供坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】使用Docker与Kubernetes进行容器化管理
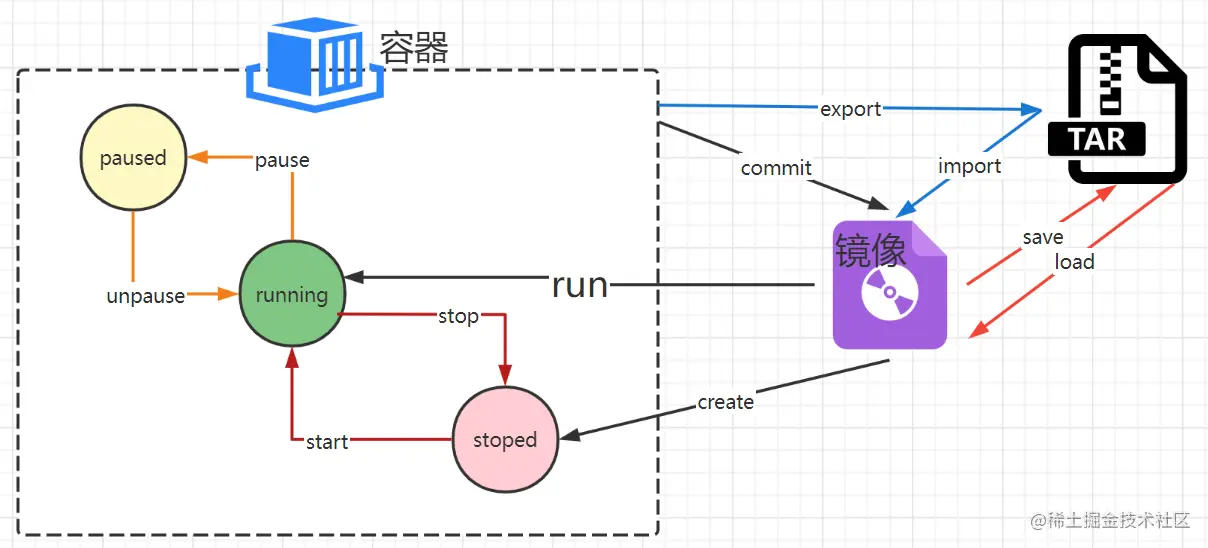
# 2.1 Docker容器的基本概念和架构
Docker容器是一种轻量级的虚拟化技术,它允许在隔离的环境中运行应用程序。与传统虚拟机不同,Docker容器共享主机内核,从而减少了资源开销并提高了性能。
Docker容器基于镜像构建。镜像是包含应用程序及
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
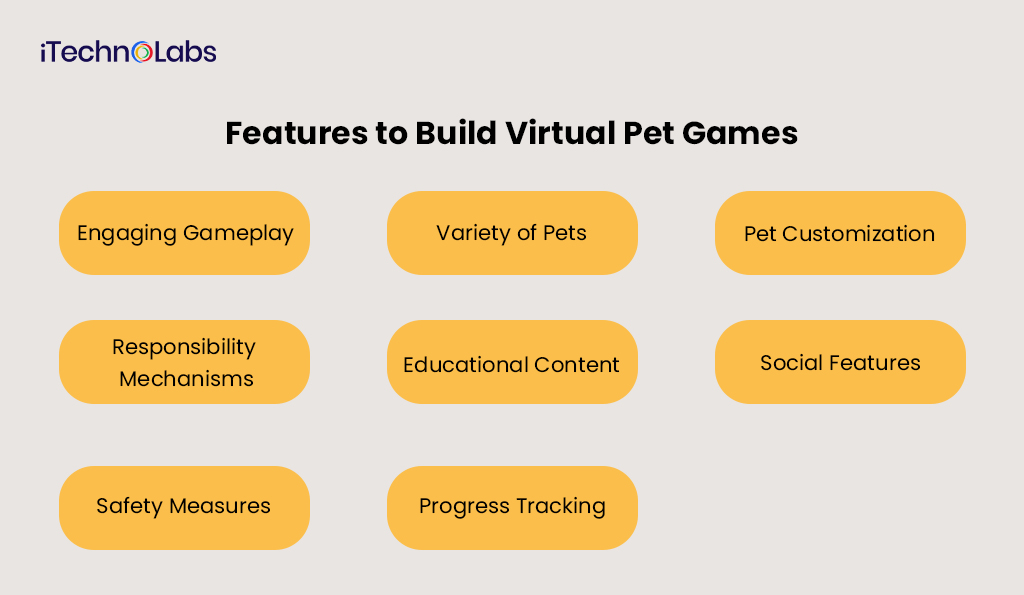
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【实战演练】通过强化学习优化能源管理系统实战
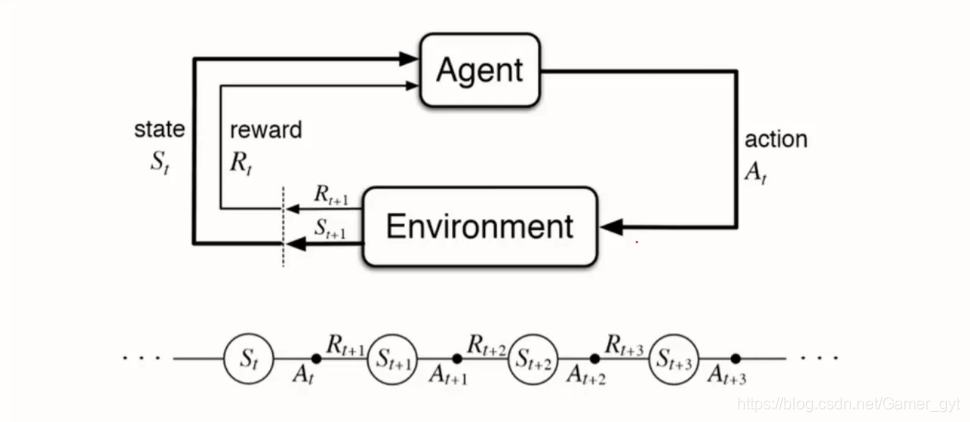
# 2.1 强化学习的基本原理
强化学习是一种机器学习方法,它允许智能体通过与环境的交互来学习最佳行为。在强化学习中,智能体通过执行动作与环境交互,并根据其行为的
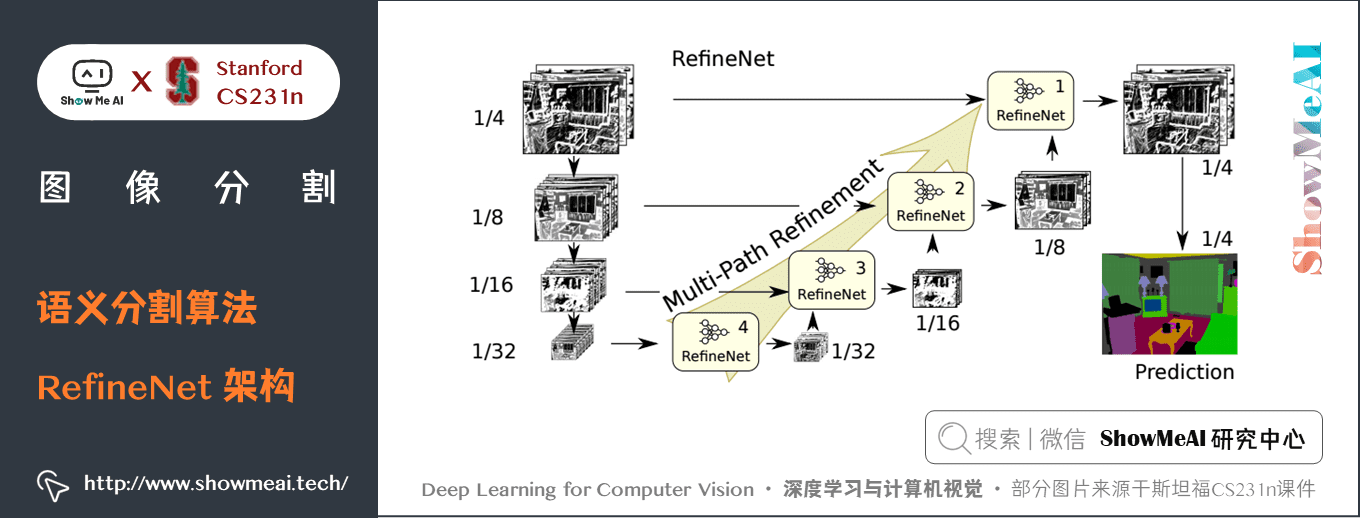
【实战演练】深度学习在计算机视觉中的综合应用项目

# 1. 计算机视觉概述**
计算机视觉(CV)是人工智能(AI)的一个分支,它使计算机能够“看到”和理解图像和视频。CV 旨在赋予计算机人类视觉系统的能力,包括图像识别、对象检测、场景理解和视频分析。
CV 在广泛的应用中发挥着至关重要的作用,包括医疗诊断、自动驾驶、安防监控和工业自动化。它通过从视觉数据中提取有意义的信息,为计算机提供环境感知能力,从而实现这些应用。
# 2.1 卷积
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
【实战演练】python云数据库部署:从选择到实施
# 2.1 云数据库类型及优劣对比
**关系型数据库(RDBMS)**
* **优点:**
* 结构化数据存储,支持复杂查询和事务
* 广泛使用,成熟且稳定
* **缺点:**
* 扩展性受限,垂直扩展成本高
* 不适合处理非结构化或半结构化数据
**非关系型数据库(NoSQL)**
* **优点:**
* 可扩展性强,水平扩展成本低
【实战演练】渗透测试的方法与流程

# 2.1 信息收集与侦察
信息收集是渗透测试的关键阶段,旨在全面了解目标系统及其环境。通过收集目标信息,渗透测试人员可以识别潜在的攻击向量并制定有效的攻击策略。
###
【实战演练】综合案例:数据科学项目中的高等数学应用

# 1. 数据科学项目中的高等数学基础**
高等数学在数据科学中扮演着至关重要的角色,为数据分析、建模和优化提供了坚实的理论基础。本节将概述数据科学
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )