MATLAB相机标定参数揭秘:深入理解其物理意义与实际应用
发布时间: 2024-06-08 18:27:25 阅读量: 206 订阅数: 51 
# 1. 相机标定概述**
相机标定是确定相机内在和外在参数的过程,这些参数对于准确地从图像中恢复三维信息至关重要。相机内参矩阵描述了相机的内部几何形状,包括焦距、主点和畸变参数。相机外参矩阵则描述了相机在世界坐标系中的位置和姿态。
相机标定对于许多计算机视觉应用都是必不可少的,包括图像矫正、三维重建、运动估计和物体检测。通过了解相机标定参数的物理意义,我们可以更深入地理解计算机视觉算法的工作原理,并提高其准确性和鲁棒性。
# 2. 相机标定参数的理论基础
### 2.1 相机模型和投影矩阵
**相机模型**
相机模型描述了三维世界点如何投影到二维图像平面上。最常见的相机模型是针孔相机模型,它假设光线从三维世界点沿直线传播,并通过一个称为光心的单点投影到图像平面上。
**投影矩阵**
投影矩阵将三维世界点坐标变换到二维图像平面坐标。它是一个 3x4 矩阵,由内参矩阵和外参矩阵组成。
### 2.2 内参矩阵和外参矩阵
**内参矩阵**
内参矩阵描述相机的固有特性,包括:
- **焦距 (fx, fy)**:水平和垂直方向的焦距,单位为像素。
- **主点 (cx, cy)**:图像平面上的光心坐标,单位为像素。
- **径向畸变系数 (k1, k2)**:校正镜头畸变的系数。
- **切向畸变系数 (p1, p2)**:校正镜头切向畸变的系数。
**外参矩阵**
外参矩阵描述相机在世界坐标系中的位置和姿态,包括:
- **旋转矩阵 (R)**:一个 3x3 矩阵,表示相机相对于世界坐标系的旋转。
- **平移向量 (t)**:一个 3x1 向量,表示相机相对于世界坐标系的平移。
### 2.3 畸变参数
**径向畸变**
径向畸变是由镜头本身的形状引起的,它导致图像边缘的点向图像中心移动或远离。径向畸变系数 k1 和 k2 用于校正这种畸变。
**切向畸变**
切向畸变是由镜头相对于图像平面的倾斜引起的,它导致图像边缘的点沿切线方向移动。切向畸变系数 p1 和 p2 用于校正这种畸变。
**代码示例:**
```matlab
% 相机内参矩阵
K = [fx 0 cx;
0 fy cy;
0 0 1];
% 相机外参矩阵
T = [R t;
0 0 0 1];
% 畸变参数
distCoeffs = [k1 k2 p1 p2];
```
**逻辑分析:**
* `K` 矩阵包含焦距、主点和畸变系数。
* `T` 矩阵包含旋转矩阵和平移向量。
* `distCoeffs` 数组包含径向和切向畸变系数。
# 3. 相机标定参数的实际应用
相机标定参数在计算机视觉和图像处理领域有着广泛的应用,为各种视觉任务提供了基础。本章节将深入探讨相机标定参数在图像矫正、三维重建、运动估计和跟踪等实际应用中的作用。
### 3.1 图像矫正和去畸变
**图像矫正**
相机标定参数可用于纠正图像中的透视失真和镜头畸变。透视失真是由相机与场景之间的相对位置引起的,导致图像中直线出现弯曲。镜头畸变是由镜头的制造缺陷或光学特性引起的,导致图像中物体出现桶形或枕形失真。
**去畸变**
通过应用相机标定参数,可以消除透视失真和镜头畸变,从而获得更准确的图像。这对于图像拼接、物体识别和三维重建等任务至关重要。
**代码示例:**
```matlab
% 读取图像
image = imread('image.jpg');
% 相机标定参数
intrinsicMatrix = [fx, 0, cx; 0, fy, cy; 0, 0, 1];
distortionCoefficients = [k1, k2, p1, p2, k3];
% 图像矫正和去畸变
correctedImage = undistortImage(image, intrinsicMatrix, distortionCoefficients);
% 显示矫正后
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MATLAB 相机标定的原理、实践和应用。从理论基础到实战指南,它提供了全面而深入的知识。专栏涵盖了标定参数的揭秘、误差分析、工具箱使用指南以及在图像处理、机器人视觉、医学影像、工业检测、无人驾驶、虚拟现实、增强现实、人脸识别、手势识别、动作捕捉和生物特征识别等领域的应用。通过深入理解相机标定技术,读者可以提升标定精度,优化标定流程,并探索标定结果在各种领域的价值,从而为计算机视觉和图像处理应用提供坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【时间序列分析】:如何在金融数据中提取关键特征以提升预测准确性

# 1. 时间序列分析基础
在数据分析和金融预测中,时间序列分析是一种关键的工具。时间序列是按时间顺序排列的数据点,可以反映出某
【线性回归时间序列预测】:掌握步骤与技巧,预测未来不是梦
# 1. 线性回归时间序列预测概述
## 1.1 预测方法简介
线性回归作为统计学中的一种基础而强大的工具,被广泛应用于时间序列预测。它通过分析变量之间的关系来预测未来的数据点。时间序列预测是指利用历史时间点上的数据来预测未来某个时间点上的数据。
## 1.2 时间序列预测的重要性
在金融分析、库存管理、经济预测等领域,时间序列预测的准确性对于制定战略和决策具有重要意义。线性回归方法因其简单性和解释性,成为这一领域中一个不可或缺的工具。
## 1.3 线性回归模型的适用场景
尽管线性回归在处理非线性关系时存在局限,但在许多情况下,线性模型可以提供足够的准确度,并且计算效率高。本章将介绍线
正态分布与信号处理:噪声模型的正态分布应用解析
# 1. 正态分布的基础理论
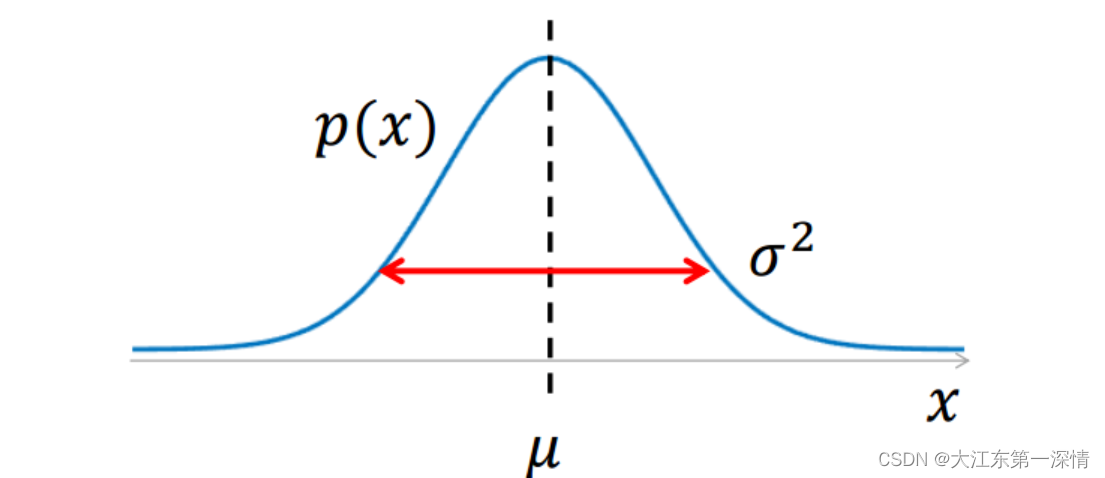
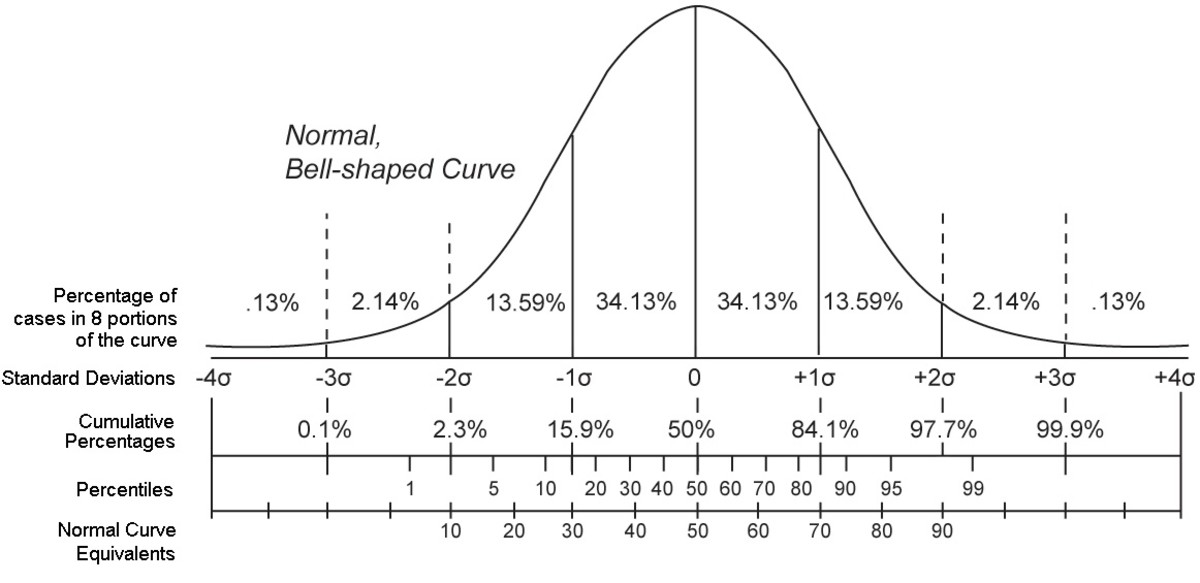
正态分布,又称为高斯分布,是一种在自然界和社会科学中广泛存在的统计分布。其因数学表达形式简洁且具有重要的统计意义而广受关注。本章节我们将从以下几个方面对正态分布的基础理论进行探讨。
## 正态分布的数学定义
正态分布可以用参数均值(μ)和标准差(σ)完全描述,其概率密度函数(PDF)表达式为:
```math
f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} e
【复杂数据的置信区间工具】:计算与解读的实用技巧
# 1. 置信区间的概念和意义
置信区间是统计学中一个核心概念,它代表着在一定置信水平下,参数可能存在的区间范围。它是估计总体参数的一种方式,通过样本来推断总体,从而允许在统计推断中存在一定的不确定性。理解置信区间的概念和意义,可以帮助我们更好地进行数据解释、预测和决策,从而在科研、市场调研、实验分析等多个领域发挥作用。在本章中,我们将深入探讨置信区间的定义、其在现实世界中的重要性以及如何合理地解释置信区间。我们将逐步揭开这个统计学概念的神秘面纱,为后续章节中具体计算方法和实际应用打下坚实的理论基础。
# 2. 置信区间的计算方法
## 2.1 置信区间的理论基础
### 2.1.1
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
独热编码 vs 标签编码:深度比较分析提升模型性能

# 1. 独热编码与标签编码基础理论
在处理分类数据时,独热编码(One-Hot E
【特征选择工具箱】:R语言中的特征选择库全面解析

# 1. 特征选择在机器学习中的重要性
在机器学习和数据分析的实践中,数据集往往包含大量的特征,而这些特征对于最终模型的性能有着直接的影响。特征选择就是从原始特征中挑选出最有用的特征,以提升模型的预测能力和可解释性,同时减少计算资源的消耗。特征选择不仅能够帮助我
大样本理论在假设检验中的应用:中心极限定理的力量与实践
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
【PCA算法优化】:减少计算复杂度,提升处理速度的关键技术

# 1. PCA算法简介及原理
## 1.1 PCA算法定义
主成分分析(PCA)是一种数学技术,它使用正交变换来将一组可能相关的变量转换成一组线性不相关的变量,这些新变量被称为主成分。
## 1.2 应用场景概述
PCA广泛应用于图像处理、降维、模式识别和数据压缩等领域。它通过减少数据的维度,帮助去除冗余信息,同时尽可能保
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )