MATLAB相机标定精要:掌握标定参数,优化标定流程,确保标定质量
发布时间: 2024-06-08 18:23:24 阅读量: 31 订阅数: 20 
# 1. 相机标定概述**
相机标定是确定相机内参和外参的过程,内参描述相机的固有特性,如焦距、畸变系数和主点位置;外参描述相机在三维空间中的位姿,如平移向量和旋转矩阵。相机标定对于计算机视觉和图像处理应用至关重要,因为它允许我们从图像中准确地恢复三维信息。
相机标定通常使用标定图案,例如棋盘格或圆形标记,这些图案在已知的三维空间中放置。通过将这些图案的图像与它们的已知三维位置相匹配,我们可以估计相机内参和外参。
# 2.1 相机模型和标定参数
相机标定旨在建立相机模型,描述相机将三维世界中的点投影到二维图像平面上的过程。相机模型包含一系列参数,这些参数描述了相机的内在和外在特性。
### 相机内在参数
相机内在参数描述了相机的固有特性,包括:
- **焦距(f):**光学中心到图像平面的距离。
- **主点(c):**图像平面上的光学中心坐标。
- **径向畸变系数(k1, k2):**描述镜头畸变的径向分量。
- **切向畸变系数(p1, p2):**描述镜头畸变的切向分量。
### 相机外在参数
相机外在参数描述了相机在世界坐标系中的位置和姿态,包括:
- **旋转矩阵(R):**描述相机坐标系相对于世界坐标系的旋转。
- **平移向量(t):**描述相机坐标系相对于世界坐标系的平移。
### 相机模型
常见的相机模型包括针孔相机模型和透视相机模型。
- **针孔相机模型:**假设光线从三维点穿过一个点(光学中心)投射到图像平面上。
- **透视相机模型:**考虑了透视投影,其中光线从三维点穿过一个平面(图像平面)投射到图像平面上。
### 标定参数
相机标定过程的目标是估计相机模型中的参数。这些参数包括:
| 参数 | 描述 |
|---|---|
| 焦距 (f) | 光学中心到图像平面的距离 |
| 主点 (c) | 图像平面上的光学中心坐标 |
| 径向畸变系数 (k1, k2) | 镜头畸变的径向分量 |
| 切向畸变系数 (p1, p2) | 镜头畸变的切向分量 |
| 旋转矩阵 (R) | 相机坐标系相对于世界坐标系的旋转 |
| 平移向量 (t) | 相机坐标系相对于世界坐标系的平移 |
通过估计这些参数,我们可以建立一个准确的相机模型,用于三维重建、视觉测量和增强现实等应用。
# 3. MATLAB相机标定实践
### 3.1 标定数据集的采集和预处理
#### 采集标定数据集
标定数据集通常由一系列图像组成,这些图像包含具有已知位置的特征点或棋盘格图案。采集标定数据集需要使用高精度相机和标定目标。
#### 预处理标定数据集
预处理标定数据集包括以下步骤:
- **图像裁剪:**裁剪出包含标定目标的区域。
- **灰度转换:**将图像转换为灰度图像。
- **阈值化:**使用阈值化技术增强特征点或棋盘格图案的对比度。
- **特征点提取:**使用角点检测算法(例如 Harris 角点检测器)提取特征点。
### 3.2 标定参数的估计和优化
#### 标定参数估计
标定参数估计的目标是找到一组参数,使投影的图像点与真实世界中的特征点位置之间的误差最小化。MATLAB 提供了 `estimateCameraParameters` 函数来估计标定参数,包括:
- **内参矩阵:**包含焦距、主点和畸变系数。
- **外参矩阵:**包含相机相对于世界坐标系的平移和旋转。
#### 标定参数优化
标定参数估计后,可以通过优化算法进一步优化参数。MATLAB 提供了 `optimizeCameraParameters` 函数,它使用非线性最小二乘法优化标定参数。
### 3.3 标定结果的评估和分析
#### 评估标定结果
标定结果的评估包括以下步骤:
- **重投影误差:**计算投影的图像点与真实世界中特征点位置之间的误差。
- **平均重投影误差:**计算所有特征点的平均重投影误差。
- **标定质量指标:**使用指标(例如归一化重投影误差)评估标定质量。
#### 分析标定结果
分析标定结果可以帮助识别标定中是否存在问题。例如:
- **高重投影误差:**可能表明特征点提取或标定算法存在问题。
- **畸变系数过大:**可能表明镜头畸变严重。
- **标定质量指标较差:**可能表明标定数据集质量较差或标定算法不适合。
```
% 评估标定结果
[imagePoints, worldPoints] = loadCalibrationData('calibrationData.mat');
cameraParams = estimateCameraParameters(imagePoints, worldPoints);
[reprojectionErrors, meanReprojectionError] = evaluateCameraParameters(cameraParams, imagePoints, worldPoints);
% 分析标定结果
if meanReprojectionError > 0.5
disp('标定质量较差,建议重新标定。');
elseif meanReprojectionError > 0.2
disp('标定质量一般,可以考虑重新标定。');
else
disp('标定质量良好,可以用于后续应用。');
end
```
# 4. 相机标定进阶技巧
### 4.1 多相机标定和联合标定
**多相机标定**
多相机标定是指同时标定多个相机,以获得它们之间的相对位置和姿态。这在立体视觉、全景拼接和运动跟踪等应用中至关重要。
**联合标定**
联合标定是一种将相机标定与其他传感器(如IMU或激光雷达)标定相结合的技术。这可以提高标定精度,并允许在更复杂的场景中进行标定。
### 4.2 非线性标定和畸变校正
**非线性标定**
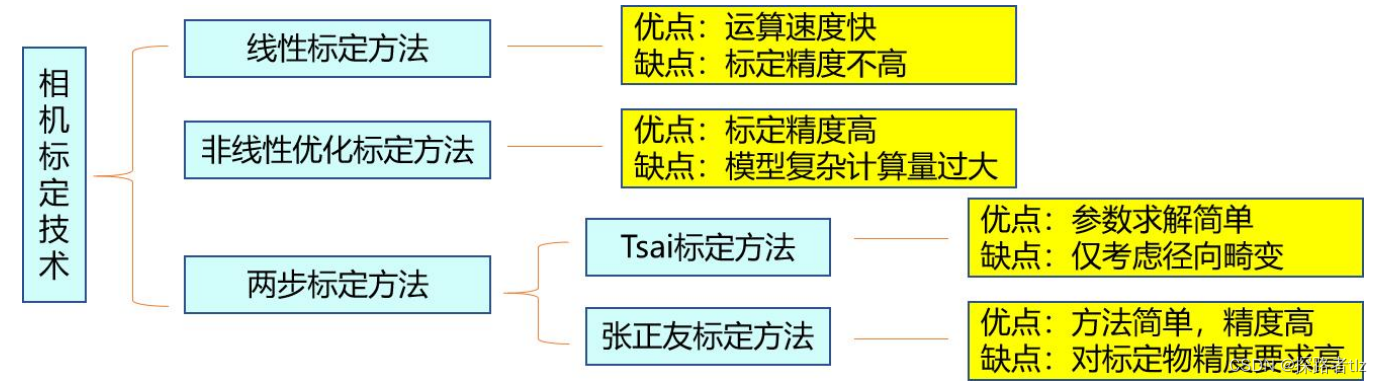
非线性标定考虑了透镜畸变和其他非线性因素对图像的影响。这比线性标定更准确,但计算成本更高。
**畸变校正**
畸变校正是指去除图像中的透镜畸变。这可以通过使用畸变模型或通过直接估计畸变参数来实现。
### 4.3 标定质量控制和故障排除
**标定质量控制**
标定质量控制包括评估标定结果的精度和鲁棒性。这可以通过检查重投影误差、内参矩阵的条件数和标定参数的稳定性来实现。
**故障排除**
如果标定失败,则需要进行故障排除。这可能涉及检查标定数据集、调整标定参数或使用不同的标定算法。
**代码示例:多相机标定**
```matlab
% 导入标定数据集
images = {'camera1.jpg', 'camera2.jpg', 'camera3.jpg'};
points3D = [1, 2, 3; 4, 5, 6; 7, 8, 9];
% 创建多相机标定对象
multiCamCalibrator = cameraCalibrator('Images', images, 'WorldPoints', points3D);
% 标定相机
[params, errors] = multiCamCalibrator.calibrate();
% 获取相机内参和外参
cameraParams = params.CameraParameters;
extrinsics = params.Extrinsics;
```
**代码逻辑分析:**
* 创建`cameraCalibrator`对象,指定图像路径和世界点坐标。
* 调用`calibrate`方法执行标定。
* 提取标定参数,包括相机内参和外参。
**mermaid流程图:多相机标定流程**
```mermaid
sequenceDiagram
participant User
participant MATLAB
User->MATLAB: Import calibration dataset
MATLAB->User: Create multi-camera calibrator object
MATLAB->User: Calibrate cameras
MATLAB->User: Extract calibration parameters
```
# 5. 相机标定应用**
相机标定在计算机视觉和相关领域有着广泛的应用,为各种视觉任务提供了精确的相机参数和几何信息。
**5.1 三维重建和视觉测量**
相机标定在三维重建中至关重要,它提供相机内参和外参,用于将二维图像投影到三维空间。通过使用标定参数,可以从多个图像中重建场景的几何形状和尺寸。
**5.2 机器视觉和图像处理**
相机标定在机器视觉和图像处理中也扮演着关键角色。它提供准确的透视变换,用于图像配准、畸变校正和物体识别。标定后的相机可以更准确地测量物体尺寸、位置和方向。
**5.3 增强现实和虚拟现实**
在增强现实和虚拟现实应用中,相机标定是实现真实世界和虚拟世界的无缝融合所必需的。它提供相机位置和方向信息,用于将虚拟内容与现实场景对齐,从而创造沉浸式的用户体验。
**代码示例:**
```matlab
% 使用标定参数进行三维重建
cameraParams = load('cameraParams.mat'); % 加载标定参数
[xyzPoints, imagePoints] = triangulate(cameraParams, ...
imagePoints1, imagePoints2); % 三角测量三维点
% 使用标定参数进行图像配准
transform = estimateGeometricTransform(image1, image2, ...
'projective'); % 估计图像之间的投影变换
warpedImage = imwarp(image1, transform); % 应用变换
% 使用标定参数进行畸变校正
undistortedImage = undistortImage(distortedImage, cameraParams); % 校正图像畸变
```
**表格示例:**
| 应用领域 | 标定参数 | 作用 |
|---|---|---|
| 三维重建 | 内参、外参 | 从图像重建三维场景 |
| 机器视觉 | 透视变换 | 图像配准、畸变校正 |
| 增强现实 | 位置、方向 | 虚拟内容与现实场景对齐 |
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MATLAB 相机标定的原理、实践和应用。从理论基础到实战指南,它提供了全面而深入的知识。专栏涵盖了标定参数的揭秘、误差分析、工具箱使用指南以及在图像处理、机器人视觉、医学影像、工业检测、无人驾驶、虚拟现实、增强现实、人脸识别、手势识别、动作捕捉和生物特征识别等领域的应用。通过深入理解相机标定技术,读者可以提升标定精度,优化标定流程,并探索标定结果在各种领域的价值,从而为计算机视觉和图像处理应用提供坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python Excel数据分析:统计建模与预测,揭示数据的未来趋势
# 1. Python Excel数据分析概述**
**1.1 Python Excel数据分析的优势**
Python是一种强大的编程语言,具有丰富的库和工具,使其成为Excel数据分析的理想选择。通过使用Python,数据分析人员可以自动化任务、处理大量数据并创建交互式可视化。
**1.2 Python Excel数据分析库**
OODB数据建模:设计灵活且可扩展的数据库,应对数据变化,游刃有余

# 1. OODB数据建模概述
对象-面向数据库(OODB)数据建模是一种数据建模方法,它将现实世界的实体和关系映射到数据库中。与关系数据建模不同,OODB数据建模将数据表示为对象,这些对象具有属性、方法和引用。这种方法更接近现实世界的表示,从而简化了复杂数据结构的建模。
OODB数据建模提供了几个关键优势,包括:
* **对象标识和引用完整性
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】综合自动化测试项目:单元测试、功能测试、集成测试、性能测试的综合应用

# 2.1 单元测试框架的选择和使用
单元测试框架是用于编写、执行和报告单元测试的软件库。在选择单元测试框架时,需要考虑以下因素:
* **语言支持:**框架必须支持你正在使用的编程语言。
* **易用性:**框架应该易于学习和使用,以便团队成员可以轻松编写和维护测试用例。
* **功能性:**框架应该提供广泛的功能,包括断言、模拟和存根。
* **报告:**框架应该生成清
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
Python map函数在代码部署中的利器:自动化流程,提升运维效率

# 1. Python map 函数简介**
map 函数是一个内置的高阶函数,用于将一个函数应用于可迭代对象的每个元素,并返回一个包含转换后元素的新可迭代对象。其语法为:
```python
map(function, iterable)
```
其中,`function` 是要应用的函数,`iterable` 是要遍历的可迭代对象。map 函数通
Python脚本调用与区块链:探索脚本调用在区块链技术中的潜力,让区块链技术更强大

# 1. Python脚本与区块链简介**
**1.1 Python脚本简介**
Python是一种高级编程语言,以其简洁、易读和广泛的库而闻名。它广泛用于各种领域,包括数据科学、机器学习和Web开发。
**1.2 区块链简介**
区块链是一种分布式账本技术,用于记录交易并防止篡改。它由一系列称为区块的数据块组成,每个区块都包含一组交易和指向前一个区块的哈希值。区块链的去中心化和不可变性使其
【进阶】基于模仿学习的强化学习算法
# 1. 模仿学习简介
模仿学习是一种机器学习技术,它使机器能够通过观察和模仿人类专家的行为来学习任务。与监督学习不同,模仿学习不需要明确的标签数据,而是从专家演示中学习。模仿学习在许多领域都有广泛的应用,例如机器人控制、自然语言处理和游戏。
# 2. 模仿学习的理论基础
### 2.1 模仿学习的定义和分类
**定义:**
模仿学习是一种机器学习技术,它允许代理通过
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )