视觉感知的车辆检测:前方碰撞预警系统研究
需积分: 38 53 浏览量
更新于2024-09-02
1
收藏 951KB PDF 举报
本文探讨了"论文研究 - 基于视觉的前方碰撞预警系统的车辆检测方法"。该研究针对高级驾驶员辅助系统(ADAS)中的前撞警告(FCW)功能,提出了一个天气自适应的解决方案。主要贡献包括:
1. **视觉车辆检测**:系统采用局部特征,如边缘信息,对车辆进行检测。通过计算水平和垂直边缘图,捕捉车辆的轮廓,这是识别车辆的关键步骤。这种方法有助于在不同光照条件下保持较高的检测精度。
2. **亮度自适应**:针对亮度变化,系统引入了自适应阈值处理。这使得边缘地图能够动态适应周围环境,减少因光照条件改变而产生的误报或漏检。
3. **边缘连接与对象生成**:通过链接边缘点,形成可能存在的对象区域,进一步提高检测的有效性。这种方法有助于减少噪声并聚焦于车辆相关的特征。
4. **候选车辆生成**:系统依据边缘响应、位置以及对称性规则,对这些可能的对象进行判断,筛选出最有可能是车辆的候选者。这一步骤对于减少非车辆目标的干扰至关重要。
5. **主成分分析(PCA)验证**:最后,论文提出利用主成分分析技术来验证候选车辆。PCA通过降低维度并保留关键信息,确保只有具有车辆特征的区域被认为是真正的车辆,从而提高了验证的准确性和鲁棒性。
6. **系统特性**:所设计的FCW系统具有多个优点,如:
- **适应性强**:无论是在明亮还是暗淡的光照条件下,边缘提取都能保持稳定性能。
- **可靠性提升**:局部特征的联合处理有助于提高整体车辆检测的准确性。
- **天气适应性增强**:通过分级车辆检测策略,系统更能应对复杂的天气环境。
- **严格的验证**:PCA验证方法确保了候选区域确实是车辆,而非背景噪音或无关物体。
这篇文章在智能驾驶领域,特别是在前方碰撞预警系统的设计和优化方面,提供了一种创新且实用的视觉车辆检测方法,为实际应用中的ADAS系统带来了重要的理论支持和技术改进。
D.-C. Tseng, C.-C. Huang
DOI:
10.4236/wjet.2017.53B010 83 World Journal of Engineering and Technology
2. Vehicle Detection
Edge information is an important feature for detecting vehicles in an image, es-
pecially the horizontal edges of underneath shadows. In the detection stage, ve-
hicle candidates are generated based on local edge features. Firstly, the appropri-
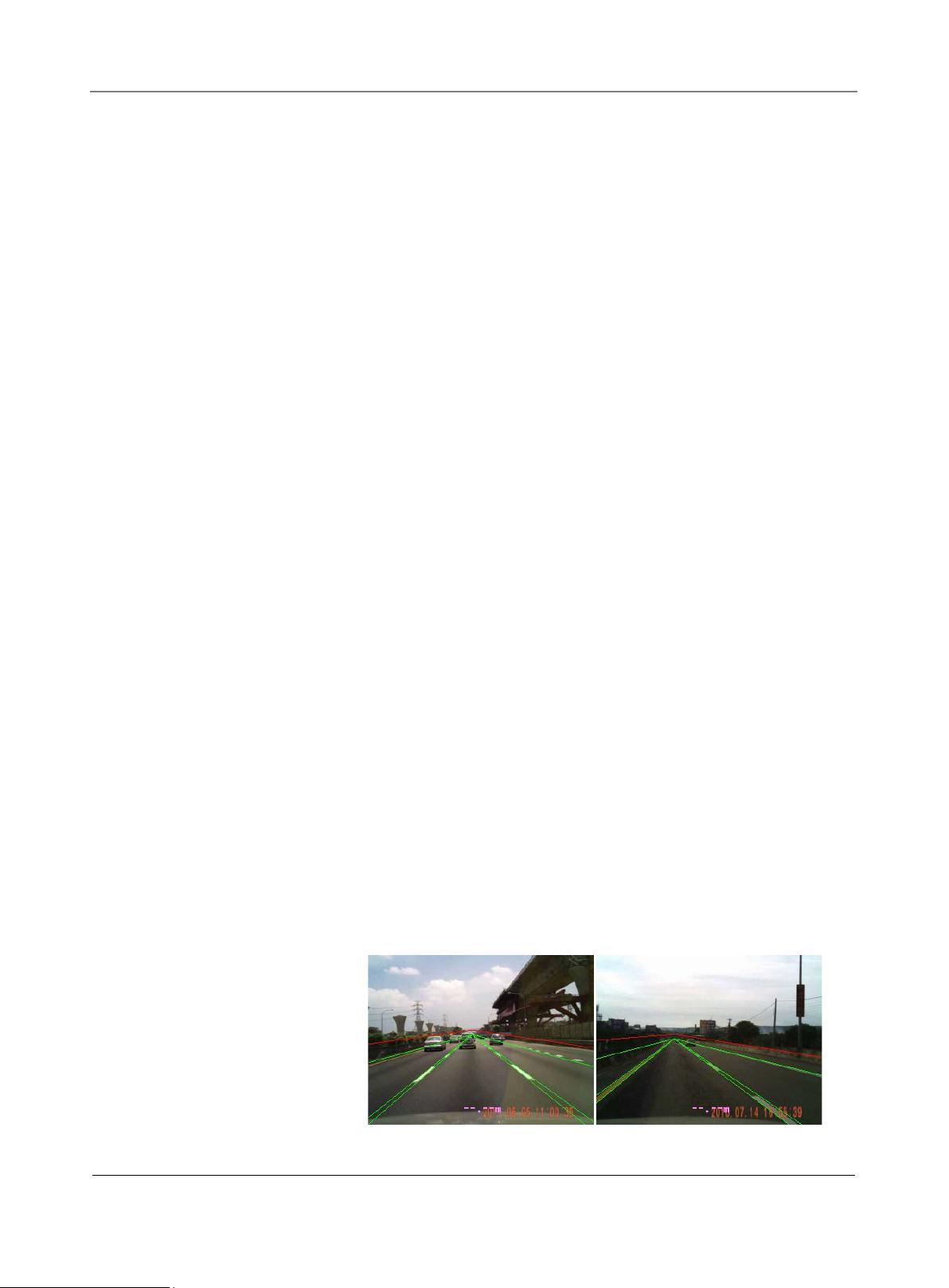
ate edge points are extracted in the region of interest
(ROI) defined by lane
marks as shown in
Figure 1. Then, the significant horizontal edges indicating
vehicle locations are refined. The negative horizontal edges (NHE) are thought
belonging to underneath shadow. The positive horizontal edges (PHE) are
mostly formed by bumper, windshield and roof of vehicles. For each kind of ho-
rizontal edges with different property, a specific procedure to find vertical bor-
ders of vehicles is applied around each horizontal edge. Finally, the horizontal
edges and vertical borders are used to find the bounding boxes of vehicle candi-
dates.
The horizontal edges are expected belonging to underneath shadows or ve-
hicle body. Considering the sunlight influences, the horizontal edges belonging
to underneath shadows are further divided into the moderate or the long by edge
widths. The procedures for searching the paired vertical borders are designed
according to the specific properties of different kinds of horizontal edges. In the
proposed vehicle detection, three detecting methods (Case-1, Case-2, and Case-
3) are respectively designed to generate vehicle candidates based on the hori-
zontal edges of underneath shadows, long underneath shadows, and vehicle bo-
dies. In the situations of clear weather with less influence from sunlight, the un-
derneath shadows are distinct and the widths of shadows are similar to vehicle
width; Case-1 method proposed based on horizontal edges of moderate under-
neath shadows is adequately used to generate candidates. In the situations of
sunny weather with lengthened shadow, there is the strong possibility that only
one vertical border is searched by using Case-1 method; Case-2 method is pro-
posed based on horizontal edge of long underneath shadows to search two cor-
responding vertical borders in a larger region, as shown in
Figure 2. In the situ-
ations of bad weather disturbed by water spray and reflection, the underneath
shadows are not reliable and are not observed at the worst; Case-3 method base
on vehicle bodies is applied in a different way to retrieve the missing cases of
using Case-1 and 2 methods.
If the only one vertical edge of the NHE is at the right side, it is taken as the
Figure 1. Two examples of
ROI
setting based on the detected lane marks.
剩余11页未读,继续阅读
点击了解资源详情
211 浏览量
169 浏览量
690 浏览量
2007-12-28 上传
2021-09-28 上传
2021-09-16 上传
2021-06-26 上传
101 浏览量

weixin_38750003
- 粉丝: 7
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







