FANUC 数字伺服维修手册:参数设定与故障调整
需积分: 9 13 浏览量
更新于2024-07-19
收藏 2.12MB PDF 举报
"FANUC 数字伺服维修资料"
FANUC 数字伺服维修资料是一份专为15-A 15-B 15i 16 18 21系统设计的CNC维修手册,由中国机电设备与维修改造技术协会及北京蓝拓机电设备有限公司联合编撰。这份资料详细阐述了关于FANUC数字伺服系统的参数设定、主要参数调整以及故障维修等关键内容。
首先,伺服参数的设置是系统运行的基础。资料中详细介绍了数字伺服的工作原理,包括伺服框图分析,帮助理解伺服系统各组成部分如何协同工作。接着,列举了与数字伺服相关的各种参数,这些参数直接影响伺服系统的性能和稳定性。如何通过系统菜单调用和设置这些参数也进行了详细说明,针对Series0-C/0D, Series15-A/B, 15i, 以及Series16, 18, 20, 21系统分别给出了具体步骤。
在维修过程中,主要伺服参数的调整至关重要。例如,为了防止停止时的震荡,可以通过调整开通速度环的比例增益、使用高速处理功能、改变停止时的比例增益、启用N脉冲抑制功能以及适当调整负载惯量比。如果存在低频波动,可以增加负载惯量比,但最终应将其恢复到系统自动设定的初始值。此外,还可以通过不断调整速度环的比例增益和降低位置环增益来改善系统性能。
对于运动中的震荡问题,有多种策略可供选择,如使用TCMD转矩指令过滤器、实施双位置环控制、启用振动抑制功能、应用机械速度反馈功能以及利用精加、减速功能。对于全闭环运动中的振荡,可以根据静态振荡情况调整参数,同时考虑双位置环反馈和机械速度反馈的有效性,并适度降低位置环增益。
在处理累计进给问题时,根据是否存在超调现象,可以启用或禁用PI控制,增加速度环增益,调整速度环积分增益,以确保系统稳定。当出现超调时,可通过启用超调抑制功能,逐步增加负载惯量比,调整速度环增益,甚至使用超调抑制功能2,以减少超调并优化系统响应。
对于IB/IC/18I系列FSSB(光纤同步串行总线)的设置,这部分内容可能涉及如何配置和诊断FSSB通信问题,以及如何优化伺服驱动器和控制器之间的数据传输,确保整个系统的高效通信和数据同步。
这份维修资料提供了全面的FANUC数字伺服系统维护和调试指南,对CNC操作人员和维修工程师来说是一份宝贵的参考资料,能够帮助他们更好地理解和解决FANUC伺服系统可能出现的各种问题。
中国机电设备与维修改造技术协会 & 北京蓝拓机电设备有限公司
维修培训班讲义 撰写 宋松
16
设定半闭环α脉冲编码器
(注 1)
F.FG 分子(≤32767) 电机每转所需的位置反馈脉冲
—————————— = ——————————————
F.F G 分母(≤32767) 1,000,000(注 2)
(不能约分小数)
注意:
1.对分子和分母,最大设定值(约分后)是 32767。
2.对柔性齿轮比,αi 脉冲编码器假定电机每转有 1000000 个脉冲,
3.如果计算电机转数时使用了π值,比如使用齿轮和齿条,假定π值
近似为 355/113
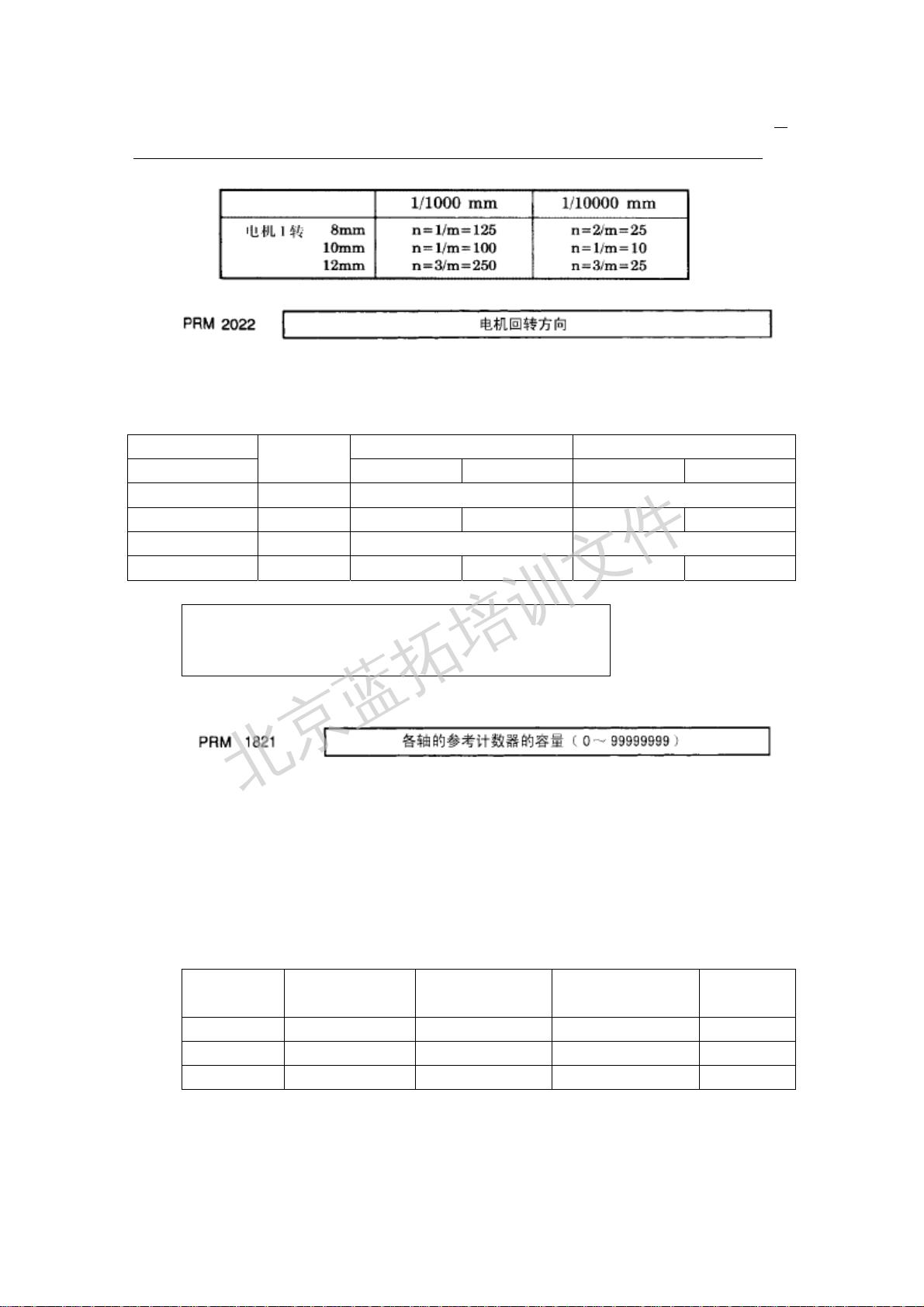
[例]
对检测单位为 1μm,指定如下:
丝杆导程
(mm/rev)
所需的脉冲数
(脉冲/转)
F.F G
10
20
30
10000
20000
30000
1/100
2/100 或 1/50
3/100
[例]
对旋转轴,机械有一 1/10 的减速齿轮和设定为 1000 度的检测单位,则电机每转一
转工作台旋转 360/10 度的移动量。
对工作台而言,每 1 度所需脉冲为 1000 位置脉冲。
电机一转的所需移动量为:
F.F G 分子/F.FG 分母=36000/1000000=36/1000
[例]
使用 0.5-um 刻度来检测 1-um 距离,设定如下:
F.FG 分子/F.FG 分母=(L/1)/(L/0.5)=1/2
设定独立脉冲编码器(全闭环)
依照最小检测单位移动量的
F.F G 分子(≤32767) 位置反馈脉冲量
—————————— = ————————————
F.F G 分母(≤32767) 1,000,000 (注 2)
(不能约分小数)
北京蓝拓培训文件

剩余115页未读,继续阅读
2021-10-07 上传
点击了解资源详情
2019-09-21 上传
点击了解资源详情
2022-07-12 上传
2021-03-19 上传
2021-10-07 上传
2015-07-22 上传
2014-05-20 上传

qq_36733444
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
