理解A*寻路算法:从复杂到简单
需积分: 9 80 浏览量
更新于2024-07-26
收藏 173KB DOC 举报
"A*寻路算法是一种广泛应用在游戏开发、路径规划等领域的高级寻路算法,旨在找到两点间最短或最优的路径。对于初学者来说,A*算法可能显得复杂,但理解其原理和实施步骤后,会发现其实效性和效率都非常高。本文将详细介绍A*算法的实现过程和核心概念。
A*算法基于网格化的搜索区域,将问题简化为2D数组,每个元素表示一个可走或不可走的格子。节点是路径规划中的关键概念,通常位于格子的中心,可以是正方形、六边形或其他多边形的中心或边缘。节点之间的连接表示可通行的路径。
搜索过程从起点(A)开始,首先将其加入开放列表(open list)。开放列表存储待检查的节点,这些节点可能是路径的一部分。接着,算法会检查起点A的相邻节点,忽略障碍物(如墙或河流),并将可走的节点加入开放列表,同时设定起点A为这些新节点的父节点。这样可以记录路径信息,便于后续回溯。
A*算法的核心在于它使用了启发式函数(heuristic function),通常选用曼哈顿距离或欧几里得距离,来估算从当前节点到目标节点的估计代价(f-score)。f-score是实际代价(g-score,从起点到当前节点的代价)和启发式估计代价(h-score)之和。每次从开放列表中选择f-score最低的节点进行扩展,以确保优先探索最有可能通往目标的路径。
在扩展节点时,算法会更新相邻节点的信息,包括它们的g-score和h-score,并相应更新父节点。这个过程持续进行,直到目标节点被添加到开放列表或者开放列表为空(意味着无解)。一旦找到目标节点,可以通过回溯父节点信息,从目标节点逆向构建出完整路径。
A*算法的优势在于其效率和准确性。它结合了Dijkstra算法的全局最优路径搜索和Greedy Best-First Search的高效性,通过启发式函数减少了不必要的搜索,从而在保证找到最优解的同时,大大提高了搜索速度。
在实际应用中,A*算法需要考虑的问题包括如何有效地存储和操作开放列表、如何处理动态变化的环境(如移动障碍物)以及如何优化启发式函数以避免过度估计或低估路径代价。优化这些方面可以使A*算法在各种复杂场景下表现更出色。
A*寻路算法虽然对初学者有一定挑战,但其强大和灵活的特性使其成为解决寻路问题的首选工具。通过深入理解和实践,开发者可以掌握这一算法,从而在游戏设计、机器人导航等领域实现高效的路径规划。"
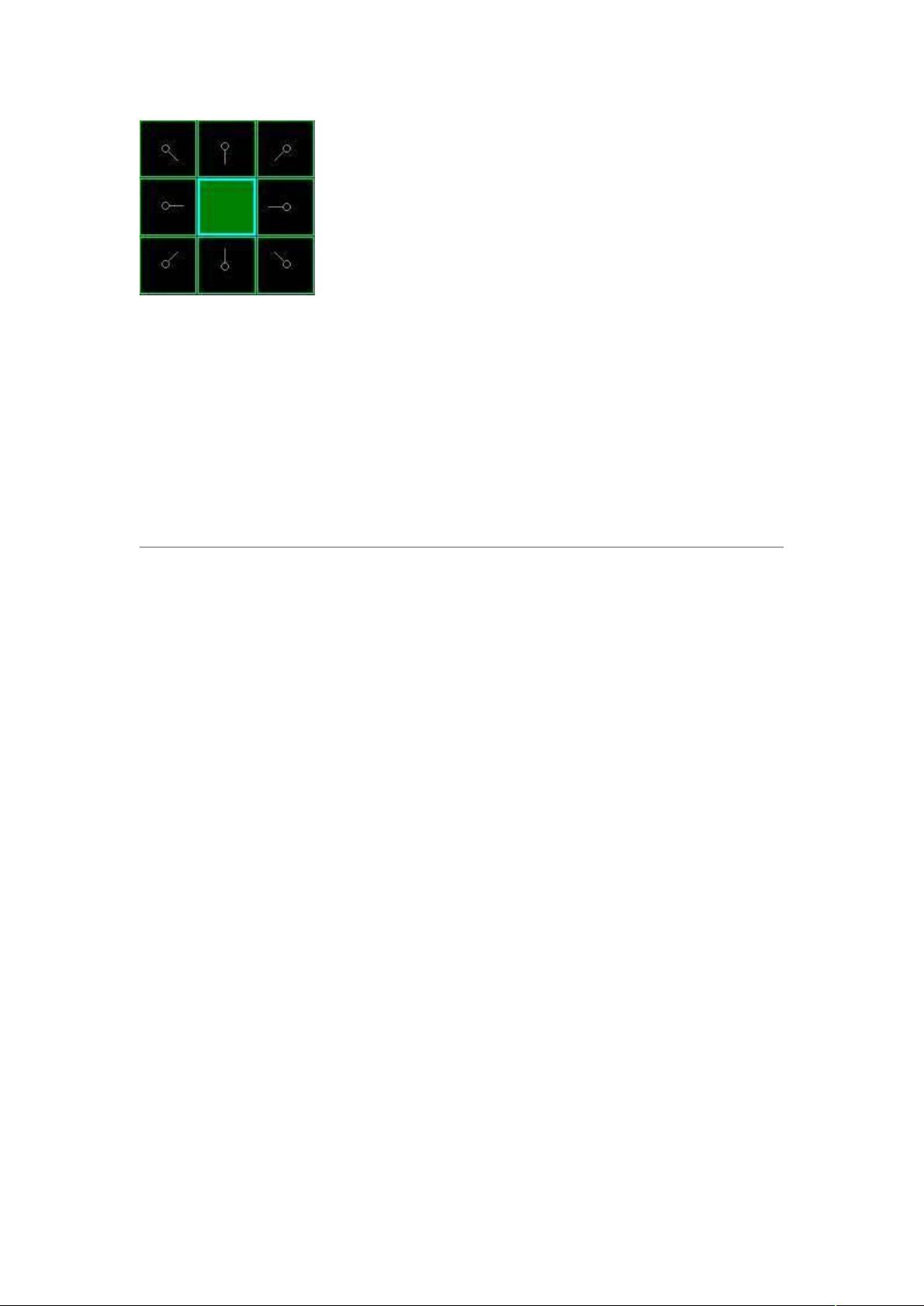
图 2 。
下一步,我们需要从 open list 中选一个与起点 A 相邻的方格,按下面描述的
一样或多或少的重复前面的步骤。但是到底选择哪个方格好呢?具有最小 F 值
的那个。
路径排序(Path Sorting)
计算出组成路径的方格的关键是下面这个等式:
F = G + H
这里,
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法,有点让
人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知
道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ) 。本教程将教
你一种计算 H 的方法,你也可以在网上找到其他方法。
我们的路径是这么产生的:反复遍历 open list ,选择 F 值最小的方格。这个
过程稍后详细描述。我们还是先看看怎么去计算上面的等式。
如上所述, G 是从起点A移动到指定方格的移动代价。在本例中,横向和纵向
的移动代价为 10 ,对角线的移动代价为 14 。之所以使用这些数据,是因为
实际的对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移
动代价。使用 10 和 14 就是为了简单起见。比例是对的,我们避免了开放和
小数的计算。这并不是我们没有这个能力或是不喜欢数学。使用这些数字也可
以使计算机更快。稍后你便会发现,如果不使用这些技巧,寻路算法将很慢。
剩余14页未读,继续阅读
383 浏览量
2012-01-04 上传
112 浏览量
361 浏览量
131 浏览量
2007-12-25 上传

Dick_1221
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 传智播客教学:苏坤主讲骑士飞行棋C#开发教程
- Andy Harris著作:HTML5傻瓜书快速参考指南
- document-change-sketchplugin:处理文档变更的SketchJS示例插件
- 数字信号处理(DSP)原理与应用全面教学
- 户外线路跟踪利器:基于Google Map的Android线路记录器
- Swift通过CocoaPods动态生成直方图图表教程
- 软件学院实验:复数计算器的设计与实现
- STM32控制ENC28j60网络模块完整项目资料及程序
- Linux环境编译Java项目含第三方库包教程
- Leaflet.PolylineMeasure: 实现地理路径长度测量的JavaScript插件
- 使用Sketch-Predefined-Pages插件优化设计工作流程
- 淘淘商城前端开发资源包:JS、CSS代码解压即用
- iPhoneAxure组件资源库:免费下载iPhone主题设计
- 2440开发板硬件原理图详细解读
- 探索Swift动画开发:SHSnowflakes雪花飘落效果
- 施耐德编程软件:特维德PLC编辑器
