基于Pixel Recurrent Neural Networks的图像生成网络
需积分: 31 102 浏览量
更新于2024-09-09
收藏 2.88MB PDF 举报
PRNN生成网络
概述:PRNN(Pixel Recurrent Neural Networks)是一种深度学习生成网络,旨在解决自然图像的分布建模问题。该网络通过顺序预测图像中的像素值,捕捉图像中的所有依赖关系,实现图像生成和重构。
**生成网络**
生成网络是一种深度学习模型,旨在学习和生成自然图像的分布。PRNN生成网络通过递归神经网络(Recurrent Neural Networks,RNN)架构来实现图像生成,捕捉图像中的空间和时间依赖关系。
**Pixel Recurrent Neural Networks**
PRNN生成网络的核心是Pixel Recurrent Neural Networks(Pixel RNN),它是一种递归神经网络架构,用于顺序预测图像中的像素值。该网络通过两种方式捕捉图像中的依赖关系:一是通过递归神经网络捕捉图像中的时间依赖关系,二是通过残差连接(Residual Connections)捕捉图像中的空间依赖关系。
**Fast Two-Dimensional Recurrent Layers**
PRNN生成网络引入了快速的二维递归层(Fast Two-Dimensional Recurrent Layers),该层可以快速地捕捉图像中的空间依赖关系,提高了网络的训练速度和生成质量。
**Effective Use of Residual Connections**
PRNN生成网络还引入了残差连接(Residual Connections),该技术可以有效地捕捉图像中的空间依赖关系,提高了网络的表达能力和生成质量。
**Log-Likelihood Scores**
PRNN生成网络可以生成高质量的图像,同时也可以计算图像的似然分数(Log-Likelihood Scores),该分数可以评估生成图像的质量和真实性。
**Image Generation**
PRNN生成网络可以生成高质量的图像,图像生成结果显示出很高的清晰度、多样性和全球一致性。
**Benchmark on ImageNet Dataset**
PRNN生成网络在ImageNet数据集上的实验结果显示,该网络可以生成高质量的图像,超过了之前的状态-of-the-art结果。
**Conclusion**
PRNN生成网络是一种强大的深度学习生成网络,能够生成高质量的自然图像,捕捉图像中的所有依赖关系。该网络的架构创新和技术创新为图像生成和重构提供了新的可能性。
Pixel Recurrent Neural Networks
The value p(x
i
|x
1
, ..., x
i−1
) is the probability of the i-th
pixel x
i
given all the previous pixels x
1
, ..., x
i−1
. The gen-
eration proceeds row by row and pixel by pixel. Figure 2
(Left) illustrates the conditioning scheme.
Each pixel x
i
is in turn jointly determined by three values,
one for each of the color channels Red, Green and Blue
(RGB). We rewrite the distribution p(x
i
|x
<i
) as the fol-
lowing product:
p(x
i,R
|x
<i
)p(x
i,G
|x
<i
, x
i,R
)p(x
i,B
|x
<i
, x
i,R
, x
i,G
) (2)
Each of the colors is thus conditioned on the other channels
as well as on all the previously generated pixels.
Note that during training and evaluation the distributions
over the pixel values are computed in parallel, while the
generation of an image is sequential.
2.2. Pixels as Discrete Variables
Previous approaches use a continuous distribution for the
values of the pixels in the image (e.g. Theis & Bethge
(2015); Uria et al. (2014)). By contrast we model p(x) as
a discrete distribution, with every conditional distribution
in Equation 2 being a multinomial that is modeled with a
softmax layer. Each channel variable x
i,∗
simply takes one
of 256 distinct values. The discrete distribution is represen-
tationally simple and has the advantage of being arbitrarily
multimodal without prior on the shape (see Fig. 6). Exper-
imentally we also find the discrete distribution to be easy
to learn and to produce better performance compared to a
continuous distribution (Section 5).
3. Pixel Recurrent Neural Networks
In this section we describe the architectural components
that compose the PixelRNN. In Sections 3.1 and 3.2, we
describe the two types of LSTM layers that use convolu-
tions to compute at once the states along one of the spatial
dimensions. In Section 3.3 we describe how to incorporate
residual connections to improve the training of a PixelRNN
with many LSTM layers. In Section 3.4 we describe the
softmax layer that computes the discrete joint distribution
of the colors and the masking technique that ensures the
proper conditioning scheme. In Section 3.5 we describe the
PixelCNN architecture. Finally in Section 3.6 we describe
the multi-scale architecture.
3.1. Row LSTM
The Row LSTM is a unidirectional layer that processes
the image row by row from top to bottom computing fea-
tures for a whole row at once; the computation is per-
formed with a one-dimensional convolution. For a pixel
x
i
the layer captures a roughly triangular context above the
pixel as shown in Figure 4 (center). The kernel of the one-
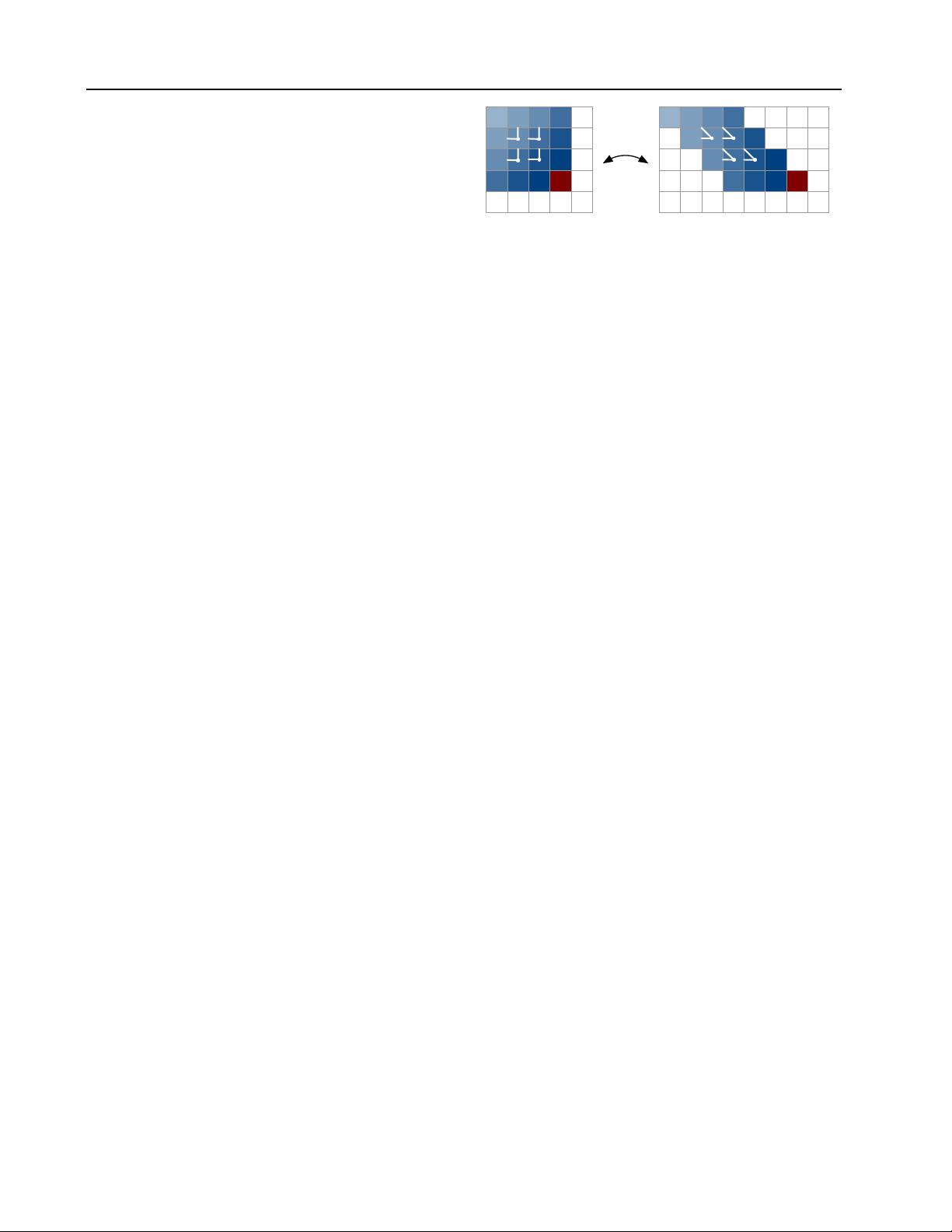
Figure 3. In the Diagonal BiLSTM, to allow for parallelization
along the diagonals, the input map is skewed by offseting each
row by one position with respect to the previous row. When the
spatial layer is computed left to right and column by column, the
output map is shifted back into the original size. The convolution
uses a kernel of size 2 × 1.
dimensional convolution has size k × 1 where k ≥ 3; the
larger the value of k the broader the context that is captured.
The weight sharing in the convolution ensures translation
invariance of the computed features along each row.
The computation proceeds as follows. An LSTM layer has
an input-to-state component and a recurrent state-to-state
component that together determine the four gates inside the
LSTM core. To enhance parallelization in the Row LSTM
the input-to-state component is first computed for the entire
two-dimensional input map; for this a k × 1 convolution is
used to follow the row-wise orientation of the LSTM itself.
The convolution is masked to include only the valid context
(see Section 3.4) and produces a tensor of size 4h × n × n,
representing the four gate vectors for each position in the
input map, where h is the number of output feature maps.
To compute one step of the state-to-state component of
the LSTM layer, one is given the previous hidden and cell
states h
i−1
and c
i−1
, each of size h × n × 1. The new
hidden and cell states h
i
, c
i
are obtained as follows:
[o
i
, f
i
, i
i
, g
i
] = σ(K
ss
~ h
i−1
+ K
is
~ x
i
)
c
i
= f
i
c
i−1
+ i
i
g
i
h
i
= o
i
tanh(c
i
)
(3)
where x
i
of size h × n × 1 is row i of the input map, and
~ represents the convolution operation and the element-
wise multiplication. The weights K
ss
and K
is
are the
kernel weights for the state-to-state and the input-to-state
components, where the latter is precomputed as described
above. In the case of the output, forget and input gates o
i
,
f
i
and i
i
, the activation σ is the logistic sigmoid function,
whereas for the content gate g
i
, σ is the tanh function.
Each step computes at once the new state for an entire row
of the input map. Because the Row LSTM has a triangular
receptive field (Figure 4), it is unable to capture the entire
available context.
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
2021-05-22 上传
2021-05-23 上传
2021-04-09 上传
2024-11-24 上传
2024-11-24 上传
2024-11-24 上传

weixin_44276261
- 粉丝: 1
- 资源: 49
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
