"改进遗传算法实现AGV动态路径规划及仿真平台开发"
需积分: 0 119 浏览量
更新于2023-12-30
收藏 1.72MB PDF 举报
本文提出了一种改进遗传算法的AGV动态路径规划算法。在传统变异算子缺少启发式规则、导致变异产生优质解的概率较低和算法早熟的缺陷的基础上,利用相连的路径片段组成的三角形建立启发式变异规则,提出了路径微调算法。同时,为了提高路径的光滑程度便于AGV行驶,提出了路径光滑处理算法。为了增加改进遗传算法的局部寻优能力,对每一代的最优解进行了模拟退火操作。并且基于Matlab GUI开发工具开发出AGV动态路径规划仿真平台,以论证所改进遗传算法求解AGV动态路径规划问题的有效性。
通过以上改进,本文的算法在AGV动态路径规划方面取得了显著的成果。首先,在解决传统变异算子缺乏启发式规则的问题上,通过建立相连路径片段的三角形,使路径缩短的启发式变异规则得以实现,从而提高了变异产生优质解的概率。其次,路径微调算法的引入,进一步解决了传统算法早熟的问题,使得算法更加具有全局寻优能力。同时,路径光滑处理算法的应用,使得AGV行驶更加平稳,提高了路径的质量和可行性。模拟退火操作的引入,进一步增加了局部寻优能力,保证了每一代的最优解的有效性。最后,通过开发出AGV动态路径规划仿真平台,不仅证明了所改进遗传算法的有效性,更为进一步的研究和应用提供了有力的工具支持。
在实际应用中,该算法可以广泛应用于各种需要动态路径规划的场景,比如AGV在工业生产中的物料搬运,AGV在智能仓储中的货物分拣等。通过该算法的应用,不仅可以提高AGV路径规划的效率和精度,更可以减少运输时间和成本,从而提高企业的生产效率和竞争力。同时,通过改进遗传算法和路径微调算法的结合应用,也为其他领域的路径规划问题提供了新的思路和方法,具有一定的借鉴意义。
总之,本文提出了一种改进遗传算法的AGV动态路径规划算法,通过引入启发式规则、路径微调算法、路径光滑处理算法以及模拟退火操作,实现了对传统算法的有效优化和改进。并通过开发出AGV动态路径规划仿真平台,证明了算法的有效性和实用性。在实际应用中也具有广阔的应用前景和推广价值,为AGV路径规划问题的解决提供了新的思路和方法。
代的概率,本文从三个方面设计适应度函数:路径长度、路径染色体与障碍物相交的路径片段数和
路径的光滑程度。
(1)路径长度和路径染色体与障碍物相交的路径片段数
obs1
1
1
1
1
1
obs1
1
1
1
1
,
,
Oppppd
Oppppd
f
ii
n
i
n
i
iii
ii
n
i
ii
(1)
式中,f
1
为目标函数,O
obs
为障碍物集合,
为惩罚因子,p
i
p
i+1
表示基因点 p
i
和 p
i+1
连接形成的线
段,并把这样的线段定义为路径片段。
obs1
obs1
0
1
Opp
Opp
ii
ii
i
(2)
(2)路径光滑程度
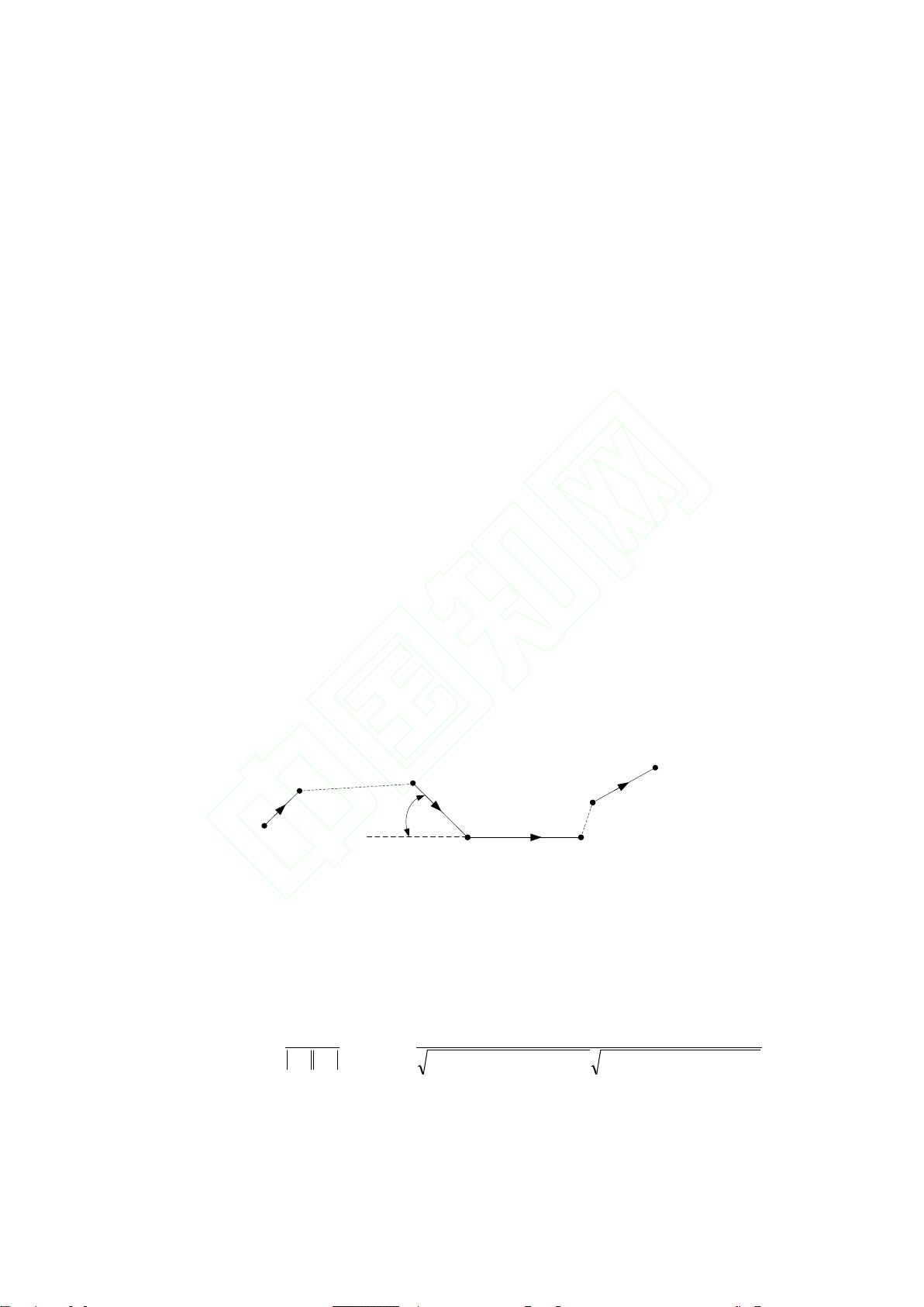
当 AGV 通过路径转弯的地方时需要减速,AGV 通过转弯处的时间与拐弯角度的大小相关,为
了提高 AGV 的运行效率需要控制路径转弯处的角度,因此把路径光滑程度作为目标函数的一部分,
保证规划出的路径接近理论最优解。转弯角度表示为沿 AGV 路径前进方向转弯前的路径与转弯后的
路径反向延长线所成角度
φ
,如图 3 所示,路径光滑程度函数用式(3)表示。
φ
越大表示路径越不
光滑,当
φ
=0 时,路径为直线。
A
B
C
起始点
目标点
ϕ
图 3 路径光滑程度示意
m
i
i
f
1
2
(3)
式中,m 表示一条完整的路径转弯次数,
φ
i
表示第 i 个转弯点转弯角度。
2
CB
2
CB
2
BA
2
BA
CBBACBBA
yyxxyyxx
yyyyxxxx
arccosarccos
CBBA
CBBA
(4)
式中,
AA
y,x
,
BB
y,x
和
CC
y,x
分别是 A、B 和 C 三点的坐标。
(3)适应度函数
剩余24页未读,继续阅读
2022-05-28 上传
2022-07-15 上传
2021-11-19 上传
2024-02-24 上传
2023-11-20 上传
2023-06-11 上传
2024-11-09 上传

狼You
- 粉丝: 27
- 资源: 324
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
