SCARA机器人设计计算与元件选择解析
版权申诉
"SCARA工业机器人设计计算说明书(精编版).pdf"
本文档是哈尔滨工业大学的一份综合课程设计报告,主要介绍了SCARA(Selective Compliance Assembly Robot Arm,选择性顺应装配机器人臂)工业机器人的设计计算过程。SCARA机器人主要用于精密装配、搬运等任务,因其快速、精确的特点在电子制造等领域广泛应用。
首先,文档简述了SCARA机器人的基本概念,然后详细探讨了其设计的关键要素。驱动方式是SCARA机器人设计中的重要因素,包括液压驱动、气压驱动和电力驱动。报告中指出,电力驱动因其高效率、易于控制和维护成本低而通常被选用。
在确定驱动方式后,报告继续讨论了减速器的选择,这是提升机器人扭矩和精度的关键部件。接着,对几种不同的传动机构进行了对比分析,如齿轮、链条、皮带传动等,分析了各自的优缺点,并初步确定了机器人的杆件参数,以满足其运动范围和负载需求。
运动空间的计算是设计过程中的关键环节,决定了机器人能到达的工作区域。报告中详述了如何进行这一计算,确保机器人能覆盖所需的作业范围。此外,还初步选择了机械臂的材料,以平衡强度、重量和成本。
接下来,文档深入到关节元件的设计计算,包括滚珠丝杆和滚珠花键的选择。这部分详细计算了滚珠丝杆的负载、转速、最大动载荷、刚度、传动效率以及驱动电机的选择。同时,针对3轴同步齿形带的设计与选型,如计算功率、带型和节距的选择、带轮齿数、带速、中心距、带长、基本额定功率和带宽等,进行了全面的分析和计算。
最后,报告提到了1轴和2轴电机及减速器的选择,这部分没有详细展开,但可以理解为在前文的基础上,根据实际工作条件和性能需求来确定电机的功率和减速器的规格。
这份报告提供了一套完整的SCARA机器人设计流程,从基础概念到具体组件的选择与计算,为设计和理解这类机器人提供了详实的参考资料。
6 / 48
买, 而且安装也较为方便;
第三关节和第四关节选择滚珠丝杆滚珠花键以及同步带传动 , 在结构紧
凑的基础上 , 保证了设计任务书中对三 , 四关节速度及运动范围的要求。
最终的传动方案如表 2-1 所示:
关节 传动方案
大臂回转 伺服电机 1 谐波减速器 大臂
小臂回转 伺服电机 2 谐波减速器 小臂
Z轴方向直线运动 伺服电机 3 同步齿形带 丝杆螺母 主轴
Z轴回转运动 伺服电机 4 同步齿形带 花键 主轴
表 2-1 传动方案
2.5 SCARA 机器人机构杆件参数初定
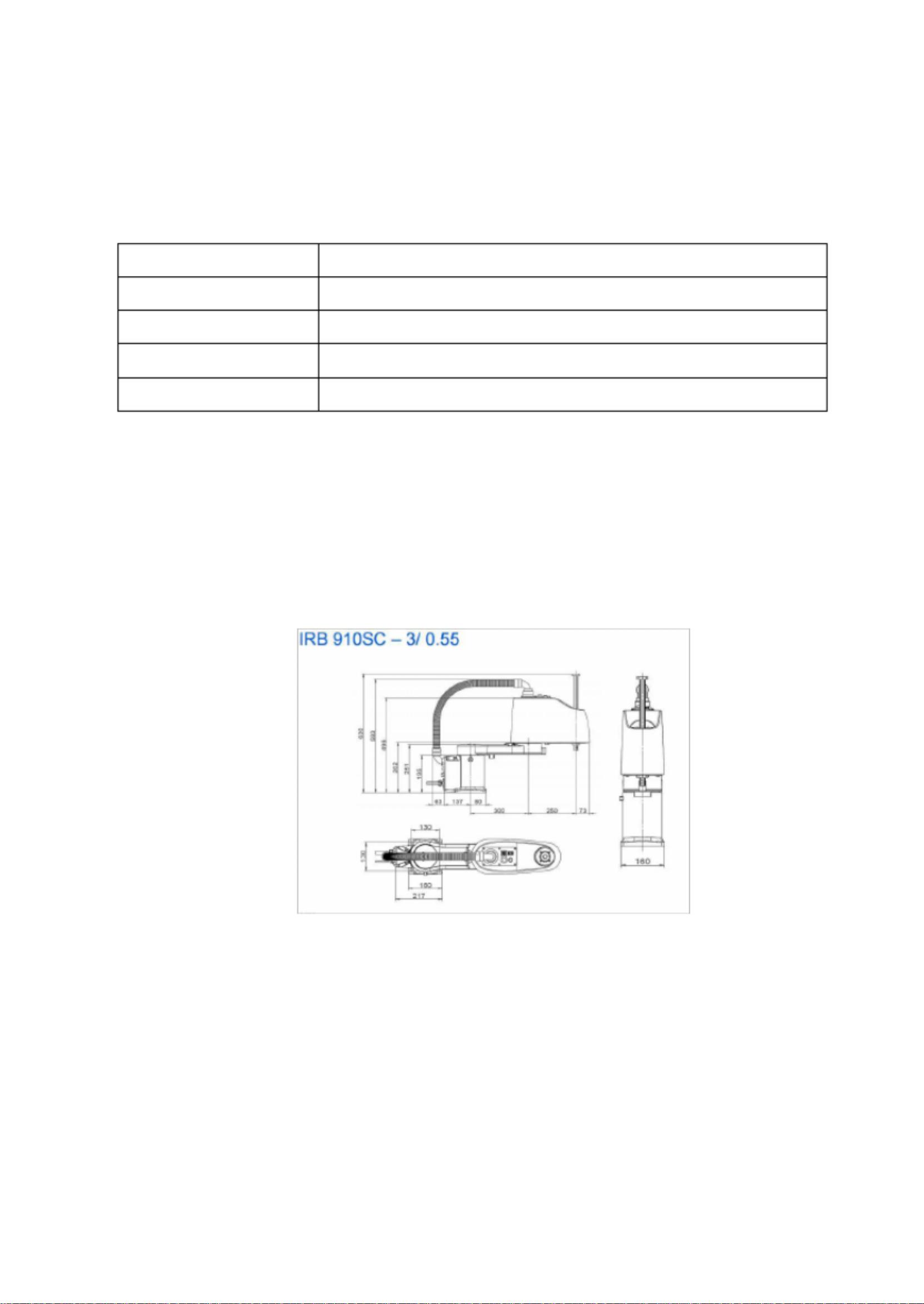
由于 scara 是相对成熟的工业级产品 , 因此可参考具体的实机进行参数初
定。这里选用 ABB公司 3 公斤级臂展 550mm的 SCARA机器人作为参考 , 其外形
图如图 2-1 所示。
图 2-1 IRB 910SC - 3/0.55 外形图
任务书要求最大展开半径要求为 560mm,初定大臂 325mm,小臂 235mm。
2.6 SCARA 机器人运动空间计算
利用 Matlab 结合 DH法计算 SCARA机器人运动空间 , 计算程序如下所示。
运动空间如图 2-2 所示。

剩余47页未读,继续阅读
点击了解资源详情
点击了解资源详情
1336 浏览量
2021-10-05 上传
2024-07-17 上传
2021-10-08 上传
120 浏览量
102 浏览量

Speak_stone
- 粉丝: 0
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- personal_website:个人网站
- css按钮过渡效果
- 解决vb6加载winsock提示“该部件的许可证信息没有找到。在设计环境中,没有合适的许可证使用该功能”的方法
- haystack_bio:草垛
- BaJie-开源
- go-gemini:Go中用于Gemini协议的客户端和服务器库
- A14-Aczel-problems-practice-1-76-1-77-
- 行业文档-设计装置-一种拉出水泥预制梁的侧边钢筋的机构.zip
- assessmentProject
- C ++ Primer(第五版)第六章练习答案.zip
- website:KubeEdge网站和文档仓库
- MATLAB project.rar_jcf_matlab project_towero6q_牛顿插值法_牛顿法求零点
- ML_Pattern:机器学习和模式识别的一些公认算法[决策树,Adaboost,感知器,聚类,神经网络等]是使用python从头开始实现的。 还包括数据集以测试算法
- matlab布朗运动代码-clustering_locally_asymtotically_self_similar_processes:项目
- 行业文档-设计装置-一种折叠钢结构雨篷.zip
- mswinsck.zip
