三菱FX2N PLC与MR-J2S-A伺服系统通信控制详解
76 浏览量
更新于2024-09-01
收藏 309KB PDF 举报
本文主要探讨了基于通信方式的三菱伺服绝对值位置控制系统的设计与实现,以三菱FX2N系列PLC与三菱MR-J2S-A系列伺服系统的集成为例。该控制系统的焦点在于实现实时读取伺服电机的当前位置,以便于满足设备在不同控制模式下的精确操作。
在控制任务中,设备首先从原始位置A点位置控制移动到工作位置B,接着以速度控制返回至任意位置C,并在C点执行其他任务。这个过程涉及两个关键阶段:位置控制和速度控制。在位置控制状态下,利用MR-J2S-A的绝对编码器(每转131072线)以及PLC中的DABS指令,PLC能在伺服驱动器通电且SON信号有效时读取电机的绝对位置。然而,这种通信方式仅在接收到上升沿的SON信号时进行一次位置数据传输,之后位置信息不会持续更新。
伺服电机的绝对位置由PLC通过脉冲数计算得出,构成一个开环控制系统。在这种情况下,只要没有报警或干扰,位置信息保持稳定。然而,当伺服驱动器切换到速度控制模式时,由于位置信息无法实时获取,传统的控制系统就无法得知电机的确切位置,这就要求控制系统具备灵活的切换和兼容能力。
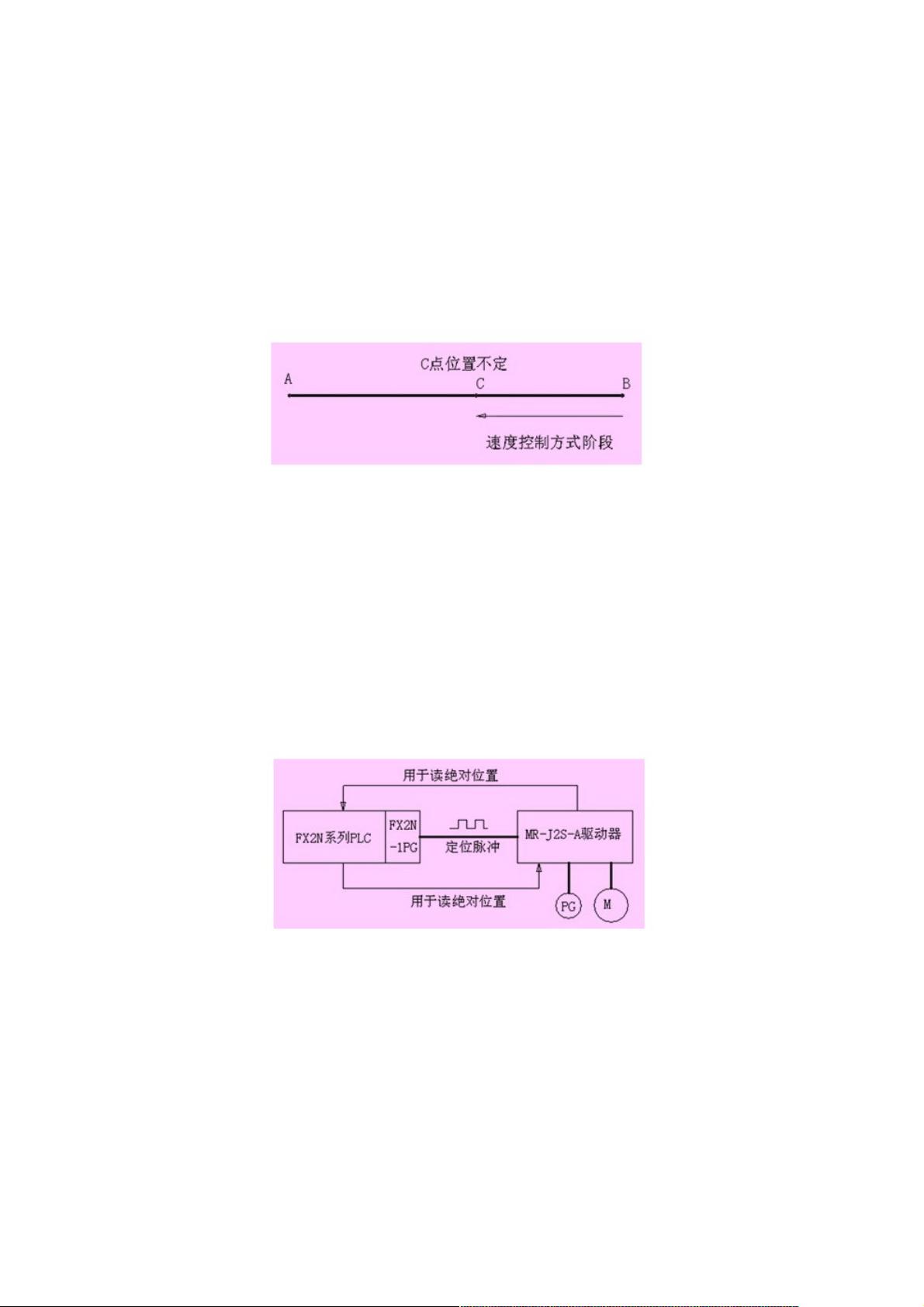
图2展示了典型的系统配置,显示了如何整合三菱伺服驱动器和PLC以实现这两种控制方式的无缝切换。在这个任务中,控制系统需要既能记忆电机在位置控制模式下的位置,又能处理速度控制模式下的动态变化,体现了现代工业控制系统的复杂性和智能化。
本文的核心知识点包括:
1. 基于通信方式的PLC与伺服系统集成,如FX2N与MR-J2S-A的接口设计。
2. 绝对位置读取原理及DABS指令的运用,强调了PLC在位置控制中的重要作用。
3. 控制系统的灵活性和兼容性,特别是在位置控制与速度控制之间的切换策略。
4. 开环控制系统的局限性以及如何在实际应用中确保位置信息的准确性。
通过理解和实现这样的控制系统,工程师可以为类似的应用场景提供有效的解决方案,提升设备的精度和控制效率。
基于通信方式的三菱伺服绝对值位置控制系统基于通信方式的三菱伺服绝对值位置控制系统
本文所讨论的三菱fx2n系列plc实时读取三菱mr-j2s-a系列伺服系统当前位置的实现方式,不仅对类似的控制场合
具有借鉴意义,而且对plc与其他设备的通讯程序编制也有启发意义。
1 引言引言
2 控制任务简介控制任务简介
这是一个实际使用的控制任务,参见图1示意。a点是设备的原始位置,b点是设备的工作位置。开始工作后,设备以位置
控制方式移到工作位置b,然后,设备从b以速度控制方式点向a点移动。在移动过程中,执行一些其他的任务,当这些任务完
成后在a与b之间的任一位置c点停止。然后以位置控制方式回到原始位置a点,这样整个工作循环结束。
图1 控制任务
2.1 控制平台
三菱j2s-a系列的伺服系统和三菱fx2n系列plc的功能和特性:三菱mr-j2s-a系列的伺服系统中伺服电机的编码器为每转为
131072线的绝对值编码器,伺服驱动器能够在停电情况下记住伺服电机的当前位置。该伺服系统有位置控制、速度控制和转
矩控制三种运行方式。同时该伺服系统内置绝对位置专用传输协议,如果菱mr-j2s-a系列的伺服系统工作在位置方式,则可配
合fx2n系列plc的dabs(读绝对位置)指令,在伺服驱动器通电后伺服on(son信号)有效时,plc中读出伺服电机的当前位
置。但仅在son信号接通时的上升沿开始传输当前伺服电机位置一次,在son信号接通以后将不再传输伺服电机的当前绝对位
置。伺服电机的当前绝对位置由位置控制装置(如fx2n-1pg模块)根据发出的脉冲数来确定。这实际上是一个开环控制系统。
在不发生报警或者脉冲传输不受到干扰的情况下,整个位置控制系统的位置将不会丢失。如果工作在速度控制方式则不能在
son接通时读取伺服电机的绝对位置,在整个工作过程中,也无法确定取伺服电机的绝对位置。图2是典型的位置控制系统配
置图。
图2 系统配置
2.2 任务分析
在本任务中,伺服驱动器将工作在位置控制和速度控制两种方式。a点和b点的定位操作,要求控制系统必需记住伺服电
机的位置,但由于b点与c点之间的速度运行方式,使得传统的控制系统不能获知伺服电机的位置。因为尽管在位置方式位置
控制器能确定伺服电机的位置,但在伺服驱动器从位置方式转变为速度方式后,位置控制器将不起作用,所以也无法确定伺服
电机的位置。由于在整个控制过程中,既有位置控制方式,又有速度控制方式,所以典型的传统控制配置将不能满足本控制任
务,必须采用一种新的控制方式来实现控制。
3 控制方案的硬件配置控制方案的硬件配置
上述问题的基本解决思路是通过plc与伺服驱动器的通讯方式,来实时读取伺服电机的当前实际位置,这样不管伺服系统
处于位置控制方式,还是在速度控制方式,控制系统都能知道伺服电机的当前位置,从而使系统能正确地定位在a点和b点。
通过查阅资料,我们了解到三菱j2s系列伺服系统除了内置绝对位置专用传输协议外,还内置了三菱伺服通讯协议;三菱fx2n
系列内置了无协议通讯指令(rs指令),所以我们可使用rs指令根据伺服驱动器的通讯协议来读取电机当前位置。图3是控制
下载后可阅读完整内容,剩余4页未读,立即下载
2019-09-16 上传
2014-11-12 上传
304 浏览量
2021-12-23 上传
2021-12-23 上传
点击了解资源详情
2024-11-07 上传
2024-11-07 上传

weixin_38643127
- 粉丝: 8
- 资源: 921
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
