信捷XG2 EtherCAT运动控制手册:2021年最新版详解
需积分: 0 34 浏览量
更新于2024-07-01
1
收藏 6.63MB PDF 举报
EtherCAT运动控制用户手册是无锡信捷电气股份有限公司针对其XG2系列可编程序控制器提供的技术文档,专注于详细介绍该控制器的EtherCAT运动控制功能。该手册主要包括以下几个关键部分:
1. **系统构成与通讯规格**:首先介绍了EtherCAT系统的构成,即主站(通常为控制器或上位机)和从站(如电机、传感器等),明确了EtherCAT作为一种实时工业以太网技术,其通讯速度和数据交换方式。
2. **从站控制器ESC**:这部分着重讲解了EtherCAT从站控制器(ESC)的工作原理和地址空间管理,说明了ESC如何与主站协作,以及它在运动控制中的角色。
3. **对象字典(CoE-Online)**:CoE-Online是EtherCAT中一种用于存储设备参数和状态信息的标准结构,用户手册解释了如何配置和利用对象字典来优化设备的通信和性能。
4. **运动指令应用**:手册深入讨论了如何通过EtherCAT实现精确的运动控制指令,包括位置、速度、加速度控制,以及可能涉及到的运动模式和策略。
5. **操作流程与使用案例**:这部分提供了实际操作步骤和实例,帮助用户理解和掌握如何通过EtherCAT接口进行设备控制和系统集成。
6. **NC配置界面**:介绍了控制器的用户界面,可能涉及到NC(Numerical Control,数值控制)的配置,用于设定运动控制参数和监控系统运行状态。
7. **示波器功能**:详细说明了控制器如何通过 EtherCAT连接外部示波器,以便于实时监控和调试运动控制信号。
8. **读写指令**:解释了EtherCAT的I/O操作,包括数据的读取和写入,这对于编程和调试至关重要。
9. **基本说明与用户须知**:提醒用户在使用前阅读手册,强调电气知识的重要性,提供技术支持联系方式,并明确责任声明,包括可能存在的错误和更新政策。
10. **联系方式**:手册最后提供了客户服务的联系方式,以便用户在遇到问题时能够及时获得帮助。
这本用户手册为用户提供了一个全面的指导,涵盖了EtherCAT运动控制的各个方面,旨在确保用户能够有效地利用信捷电气的XG2系列控制器进行精确、高效和安全的工业自动化控制。
EtherCAT 运动控制用户手册 2 EtherCAT 通信规格
9
2-4.SII 区域(0000h~003Fh)
ESC配置区域(EEPROM字地址0000h〜0007h)内,Configured Station Alias在驱动器电源启动后,根
据ESC自动读取,写入ESC寄存器。将SII EEPROM変更后的值反映到ESC寄存器时,需要再次启动电源。
除此之外IP核(ET1810/ET1811/ET1812)的初始值被设定。详细内容请参照IP核(ET1810/ET1811/ET1812)
的数据表。
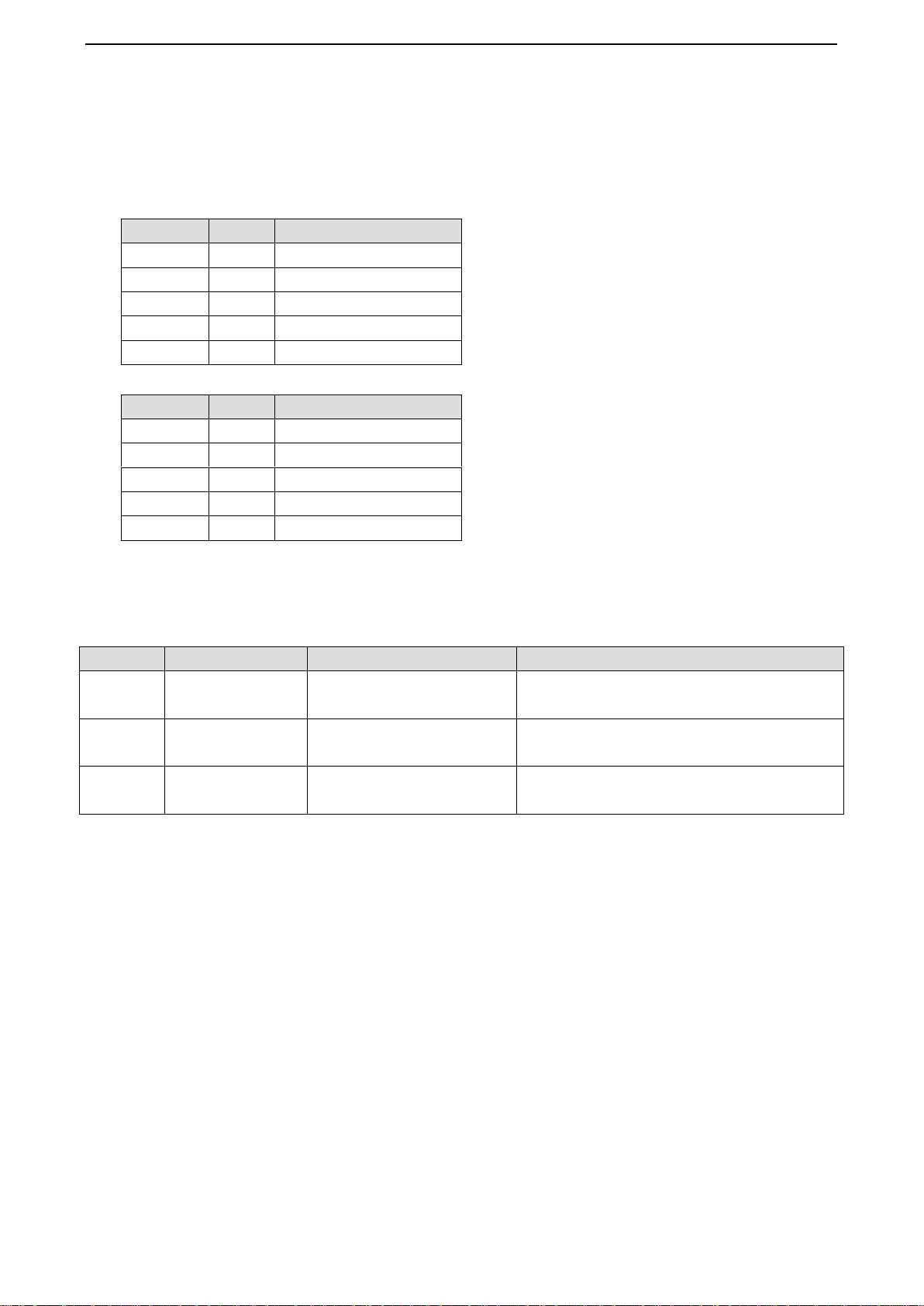
2-5.SDO(Service Data Object)
DS5C系列支持SDO(Service Data Object)。SDO的数据交换使用Mailbox通信,所以SDO的数据刷新
时间变得不稳定。
主站侧在对象字典内的记录中读写数据,可进行对象设定以及从站的各种状态的监测。到SDO的读写
动作的响应需要花费时间。用PDO刷新的对象请不要用SDO来刷新,用PDO的值覆盖。
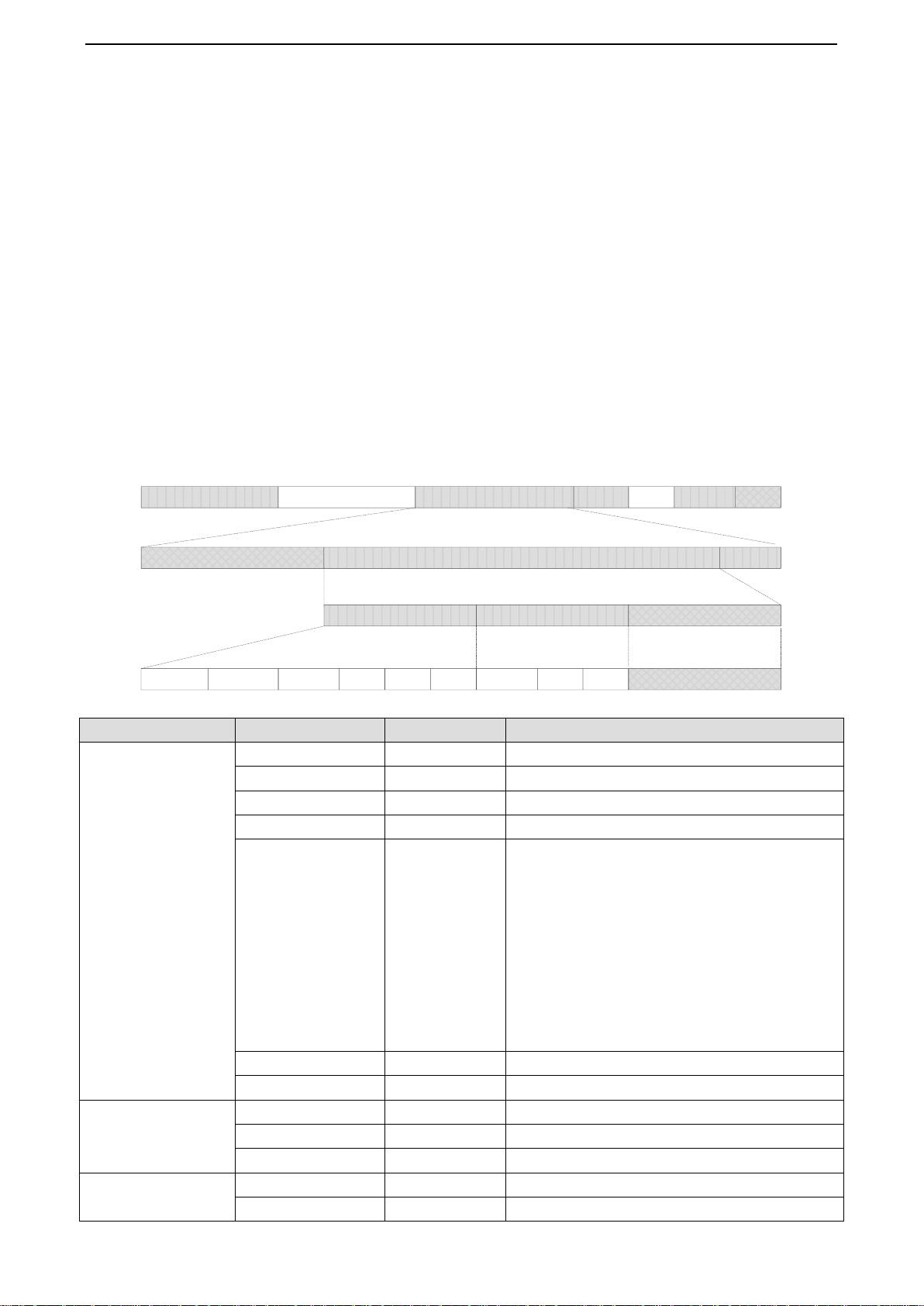
2-5-1. Mailbox 帧结构
Mailbox/SDO的帧结构如下所示。详细请参照ETG规格书(ETG1000-5及ETG1000-6)。
Ethernet Header EthernCAT Header 1st EtherCAT Datagram
2nd… … Nth…
FCS
Datagram Header Mailbox Protocol WKC
Mailbox Header CoE Header Cmd Specific
Cmd SpecificServResNumberCntTypePrioChannelAddressLength
10byte Max:1486byte 2byte
6byte
2byte Max:1478byte
16bit 16bit
6bit 2bit 4bit 4bit
9bit
3bit 4bit
Max:1478byte
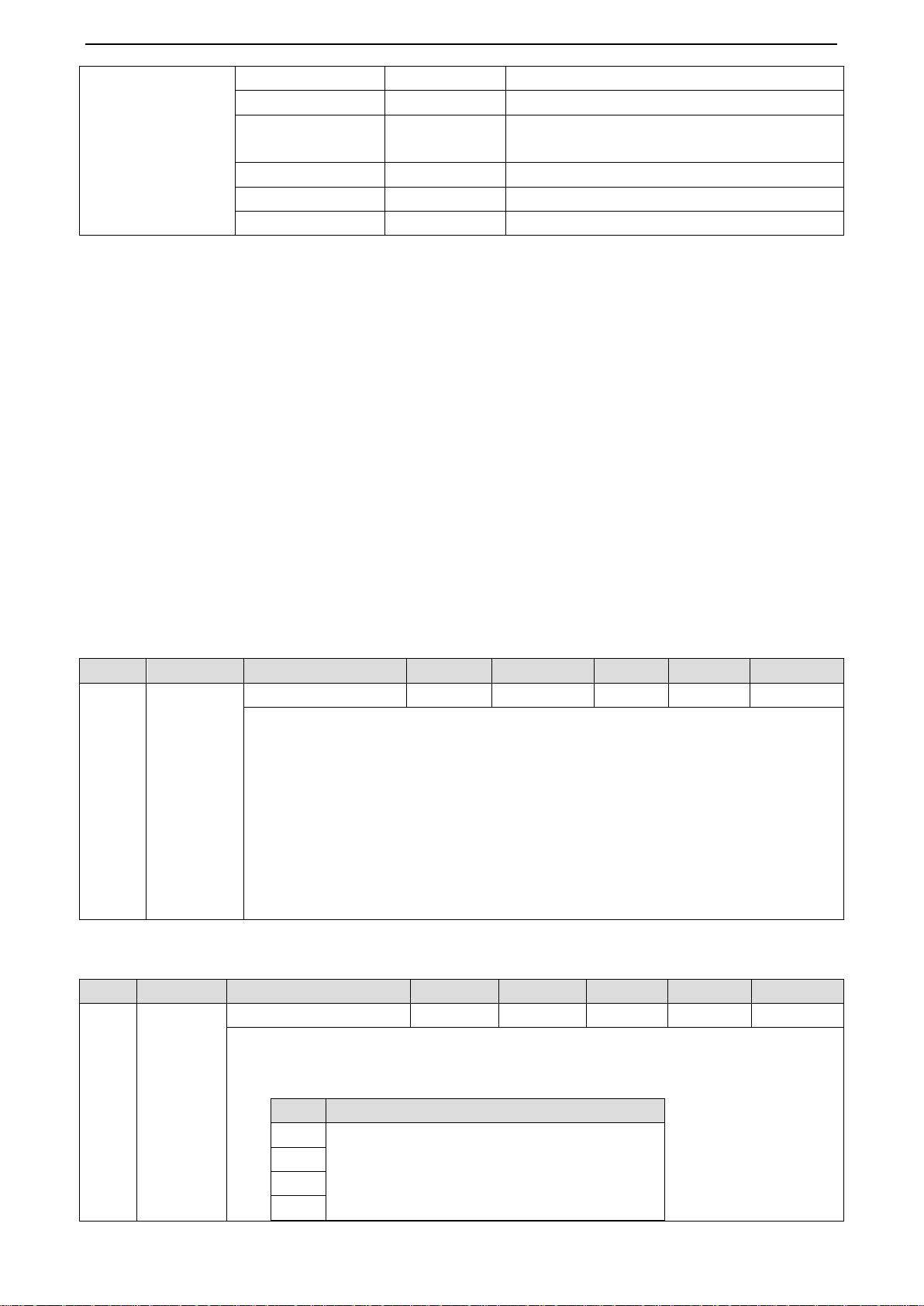
帧部
数据区域
数据类型
功能
MailBox Header
Length
WORD
Mailbox的数据长度
Address
WORD
发信源的站地址
Channel
Unsigned6
(Reserved)
Prority
Unsigned2
优先度
Type
Unsigned4
Mailbox型
00h:错误
01h:(Reserved)
02h:EoE(未对应)
03h:CoE
04h:FoE(未对应)
05h:SoE(未对应)
06h-0Eh:(Reserved)
0Fh:VoE(未对应)
Cnt
Unsigned3
Mailbox计数器
Reserved
Unsigned1
(Reserved)
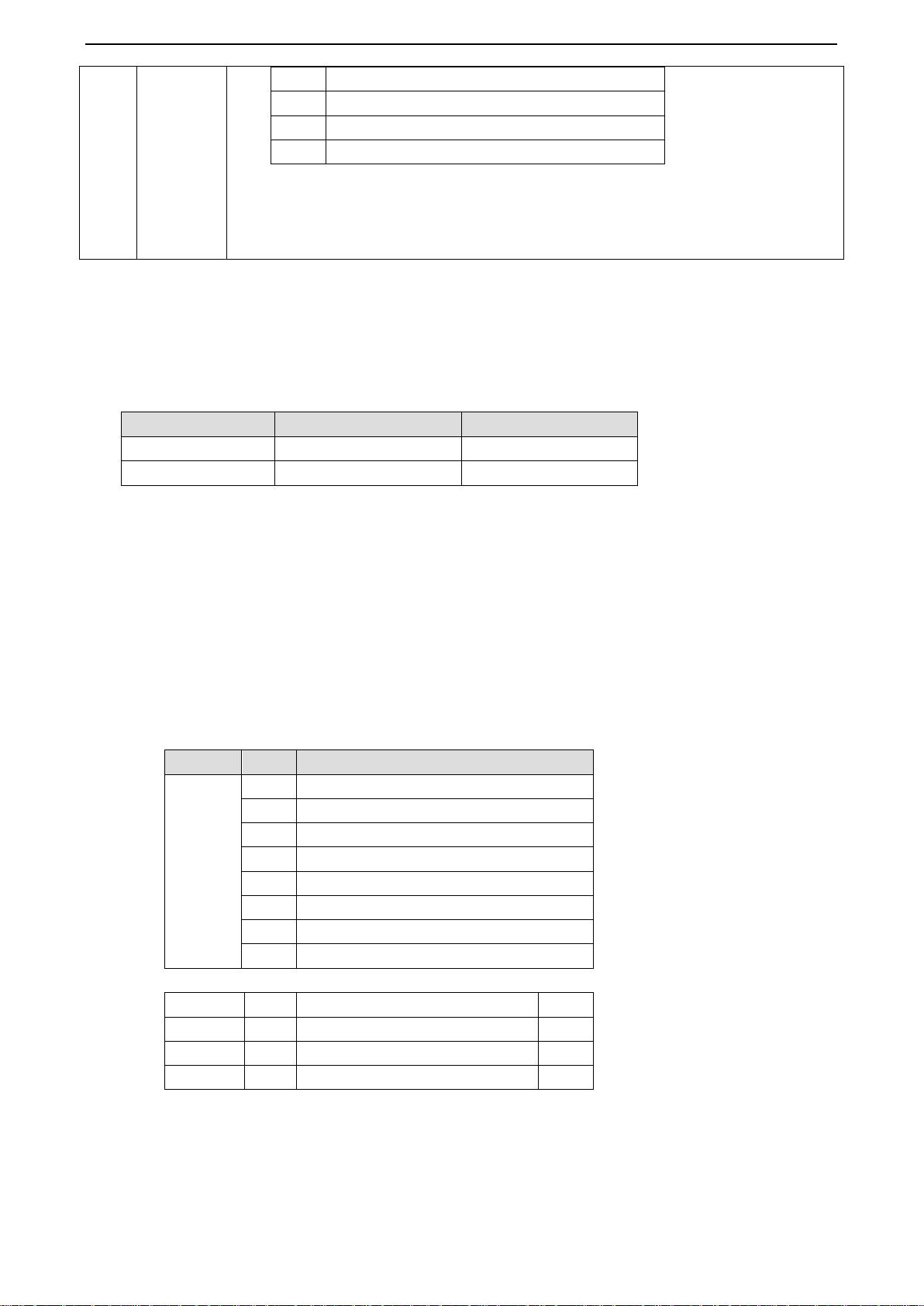
CoE Header
Number
Unsigned9
Reserved
Reserved
Unsigned3
Reserved
Service
Unsigned4
信息型
Cmd specific
Size Indicator
Unsigned1
Data Set Size使用许可
Transfer Type
Unsigned1
Normal转送/Expedited转送择
剩余174页未读,继续阅读
2018-08-03 上传
2021-09-24 上传
2021-09-24 上传
2021-09-04 上传
2021-04-21 上传
2019-10-29 上传

嗨了伐得了
- 粉丝: 23
- 资源: 290
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
