多通道系统H1滤波:随机延迟、连续丢包与随机非线性的处理
83 浏览量
更新于2024-08-26
收藏 527KB PDF 举报
本文探讨了多通道网络系统中的H∞滤波问题,特别关注那些具有随机变化延迟、连续数据包丢失以及随机出现的非线性特性的情况。系统中的关键挑战包括不可预测的时间延迟、数据传输的不完整性以及可能存在的随机非线性效应,这些因素都会对控制系统的性能造成影响。
研究者Xiu-Ying Li和Shu-Li Sun来自黑龙江大学自动化系,他们针对这类复杂系统提出了一个线性全阶滤波器的设计策略。他们通过引入一组满足伯努利分布的相互独立随机变量来模型化寻址系统,这种方法能够更好地捕捉和管理不确定性。设计目标是在所有允许的时间延迟范围内,即使在频繁的数据包丢失和随机非线性条件下,也能确保滤波误差的动力学保持指数稳定的性能。
滤波器的设计原则是确保在系统受到这些不确定因素的影响时,仍能保持H1性能指标的稳定。H1滤波器在这里被用来衡量系统的鲁棒性,它能够在保证控制性能的同时,抑制系统受到外部干扰的影响程度。设计过程中,关键步骤是解决线性矩阵不等式(LMIs),这是一种数值优化工具,通过求解这些不等式,可以找到所需的滤波器增益,从而确保滤波器的性能优化。
文章强调,设计方法不仅关注滤波器的存在性,还提供了解决实际问题的实用途径。作者给出的示例展示了这一方法的有效性,它证实了在复杂的网络环境中,即使面对随机性和不确定性,设计出的H∞滤波器仍然能够维持系统的稳定性和性能。
这篇文章对于网络控制系统研究者来说是一篇重要的贡献,因为它提供了处理具有可变延迟、连续丢包和随机非线性的多通道系统H∞滤波问题的理论框架和实践方法,这对于保证网络控制系统的可靠性和稳定性具有重要意义。
and v
k
A ℜ
r
, assumed to belong to l
2
½0; 1Þ, are the process
noise and measurement noise, respectively; A, C, D and L are
known constant matrices. d is the maximum number of the
possibly occurred nonlinearities. The random v ariables
α
i;k
ð1r ir dÞ are introduced to describe the random nature
of nonlinearities' occurr ence, which are mutually uncorre-
lated Bernoulli distributed and have the following statistical
charact eristics:
Probfα
i;k
¼ 1g¼Εfα
i;k
g¼α
i
;
Probfα
i;k
¼ 0g¼1α
i
;
Efðα
i;k
α
i
Þðα
j;k
α
j
Þg ¼
α
i
ð1 α
i
Þ¼ϑ
2
i
i ¼ j
0 ia j
(
; i; j ¼ 1; 2; ⋯; d
ð2Þ
where
α
i
A ½0; 1 are known constants.
The nonlinear functions f
i
ðx
k
Þði ¼ 1; ⋯; dÞ are assumed
to satisfy the following sector-bounded conditions with
f
i
ð0Þ¼0, and
½f
i
ðxÞf
i
ðyÞU
1i
ðx yÞ
T
½f
i
ðxÞf
i
ðyÞU
2i
ðx yÞ r 0; 8x; yA ℜ
n
:
ð3Þ
where U
1i
, U
2i
A ℜ
nn
are known real constant matrices,
and U
1i
U
2i
are positive definite matrices. It is customary
that the nonlinear functions f
i
ðx
k
Þ described in (3) are said
to belong to sectors ½U
1i
; U
2i
[33].
Remark 1. It is well known that the T S fuzzy model is
an effective method to analyze and synthesize nonlinear
systems. But how to select the number of IF-THEN rules
and the type of membership functions does not have the
unified disciplines. Compared with the well-studied fuzzy
filtering method, the nonlinearities existing in model (1)
are taken as environmental disturbances which are ran-
domly changeable with the known probabilities in terms
of their sector-bounded types. Furthermore, the sector-
bounded condition (3) can be transformed into the
inequality constraints, which will be added in the subse-
quent LMI derivation by rigorous mathematical deduction.
Here, we assume that the sensors are clock-driven. The
measured output
~
y
k
is packed and sent to the remote filter
side through the networks. The network protocol under
consideration is the UDP/IP case. The packet losses and one-
step time delays will be in volv ed d uring the data transmission
which can be described in a unified model [1 9]
y
k
¼ ξ
k
~
y
k
þð1 ξ
k
Þð1 ξ
k 1
Þβ
k
~
y
k 1
þð1ξ
k
Þ½1 ð1ξ
k 1
Þβ
k
y
k 1
ð4Þ
where y
k
A ℜ
r
is the actual signal received by the filter, and ξ
k
and β
k
are independent random v ariables satisfying the
Bernoulli distribution. It can be seen that the popularly used
model y
k
¼ ξ
k
~
y
k
þð1 ξ
k
Þy
k 1
which describes the multiple
packet dropouts and the model y
k
¼ ξ
k
~
y
k
þð1 ξ
k
Þ
~
y
k 1
which describes the random one-step transmission delay
are contained in model (4) simultaneously.
In practical engineering, however, there is a large
amount of MIMO controlled systems. When the sampled
data of individual sensor are transmitted through different
channel link s, there will be different packet loss rates and
time delay rates for each channel. Considering the inves-
tigated issues, the measurement received by the filter is
described by
y
k
¼ Ξ
k
~
y
k
þðI Ξ
k
ÞðI Ξ
k 1
ÞΘ
k
~
y
k 1
þðI Ξ
k
Þ½I ðI Ξ
k 1
ÞΘ
k
y
k 1
ð5Þ
where y
k
¼ vec
T
r
fy
i;k
g,
~
y
k
¼ vec
T
r
f
~
y
i;k
g, Ξ
k
¼ diag
r
fξ
i;k
g, Θ
k
¼
diag
r
fβ
i;k
gði ¼ 1; ⋯; rÞ. ξ
i;k
and β
i;k
ð1r ir rÞ are Bernoulli
distributed random variables, which are uncorrelated with
each other and also mutually independent of α
i;k
ð1r ir dÞ.
The probability distributions are given by
Probfξ
i;k
¼ 1g¼Εfξ
i;k
g¼ξ
i
; Probfξ
i;k
¼ 0g¼1 ξ
i
;
Probfβ
i;k
¼ 1g¼Εfβ
i;k
g¼β
i
; Probfβ
i;k
¼ 0g¼1β
i
:
where
ξ
i
; β
i
A ½0; 1 are known constants. For each channel,
the corresponding probability of the on-time arrival rate,
one-step delay rate and the packet loss ra te are gi ven by
Probfξ
i;k
¼ 1g¼ξ
i
,Probfξ
k
¼ 0; ξ
i;k 1
¼ 0; β
i;k
¼ 1g¼ð1
ξ
i
Þ
2
β
i
,andProbfξ
i;k
¼ 0; ξ
i;k 1
¼ 1gþProbfξ
i;k
¼ 0; ξ
i;k 1
¼
0; β
i;k
¼ 0g¼ ð1 ξ
i
Þξ
i
þð1 ξ
i
Þ
2
ð1 β
i
Þ, respectivel y.
Remark 2. It is noted from model (5) combined with (1)
that the measurement y
k
contains the consecutive packet
losses and the one-step varying delays as well as randomly
occurred nonlinearities. Recently, some results on the H
1
filtering for NCSs with RONs have been reported in the
literatures [27,32,20]. However, the phenomenon of packet
dropouts is only considered in [27,32], and the network-
induced time delays are not included in the presented
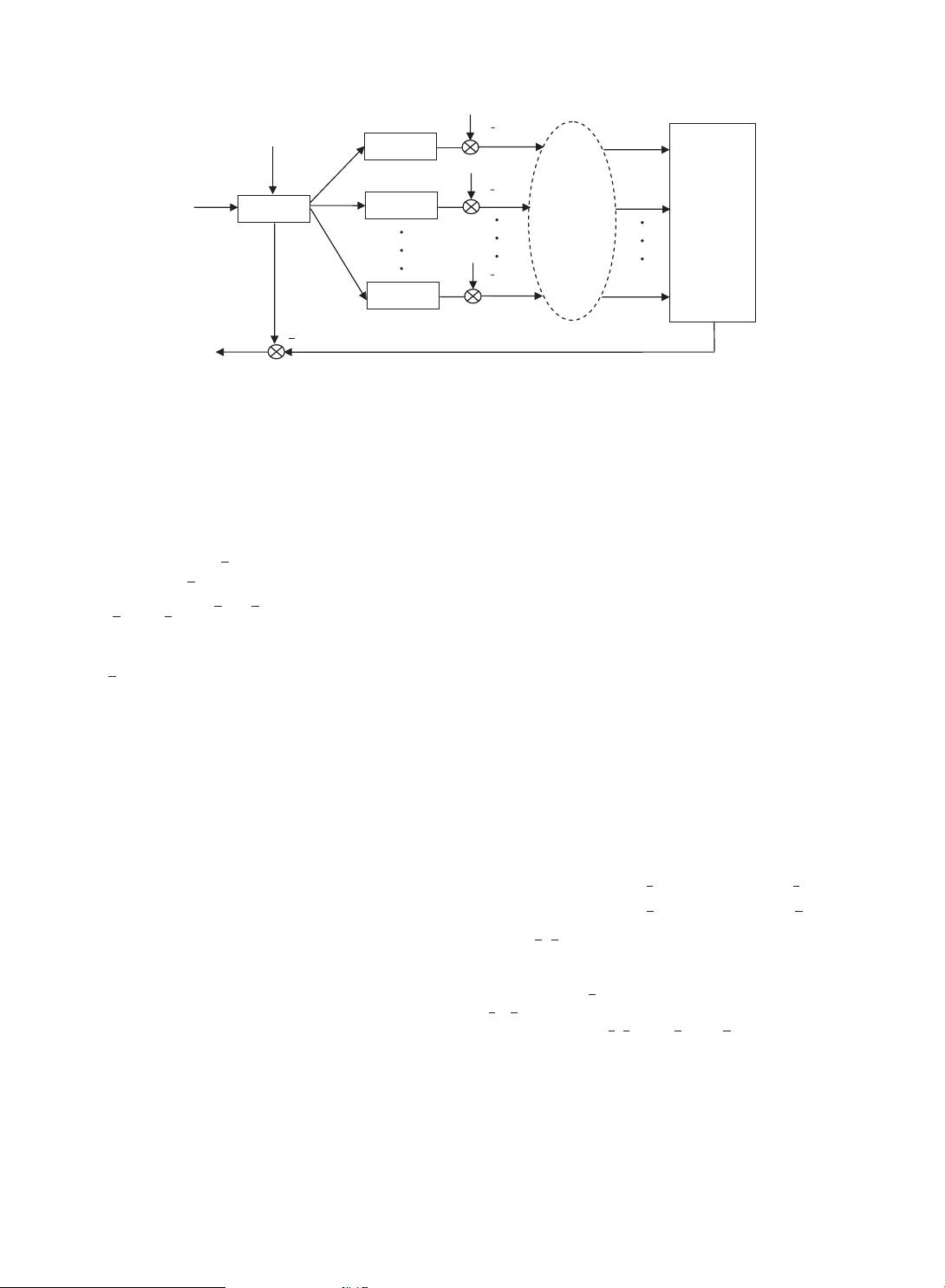
Plant
Sensor 1
Sensor 2
Sensor r
Network
Filter
,rk
y
2,k
y
1, k
y
1,k
v
2,k
v
,rk
v
()
ik
f
x
k
w
1,k
y
2,k
y
,rk
y
k
z
k
e
ˆ
k
z
Fig. 1. Structure of the considered networked systems.
X.-Y. Li, S.-L. Sun / Signal Processing 105 (2014) 109–121 111
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-09-18 上传
117 浏览量
2022-03-19 上传
点击了解资源详情
点击了解资源详情
118 浏览量

weixin_38628243
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
