机器人编程实验指南:清华制造系统实验
45 浏览量
更新于2024-06-28
收藏 325KB DOC 举报
“清华制造系统实验:机器人编程实验指导书”
这篇文档是清华大学制造系统实验中的一个部分,专门针对机器人编程实验提供指导。实验的主要目标包括学习机器人的操作、手动控制和程序控制,以及掌握通过编程控制机器人执行特定任务的过程。
实验内容主要包括以下几个方面:
1. 示教盒操作:实验者需要学习如何使用示教盒来手动调整机器人的位置和姿态。示教盒是机器人编程中常用的工具,允许操作人员通过直接操纵机器人来记录和创建机器人的运动路径。
2. 程序设计:实验者需要根据给定的参照文件,理解和掌握控制机器人的指令和方法,编写机器人控制程序。这涉及到对机器人运动路径的规划和编程,确保机器人能够在不发生干涉的情况下执行任务。
3. 空间路径规划:实验者需手动调节机器人,使其能从参考点移动到物料带上取料,然后将物料送到卡盘进行加工,加工完成后,再将物料送回料带的指定位置。这个过程中,需要设定足够的路径点以避免机器人运动时的碰撞。
4. 程序验证:在程序编写完成后,需要在实际运行中测试机器人是否能按照预期路径无误地运行。如果发现机器人动作有误或存在干涉,应进行程序的调整和优化。
5. 教师指导与程序生效:最后,实验者需要向指导教师展示编写的控制文件,由教师检查路径点和程序的正确性,并在教师的指导下完成程序的生效和运行,确保程序控制下的机器人能够安全、有效地执行任务。
实验设备包括RV-M1机器人、示教盒和零件毛坯。实验步骤详细列出了从理解程序文件、熟悉示教盒操作,到手动调试、编程、测试和教师审查的全过程。
在进行实验时,实验者需要使用文本编辑器创建和编辑机器人程序文件,遵循一定的命名规则,例如“组号_Convpart1.rob”。同时,还需密切关注机器人在执行任务时的行为,以确保程序的准确性和安全性。
整个实验旨在通过实践操作,提升实验者对机器人控制的理解和技能,为未来在智能制造领域的工作打下坚实的基础。
.
.
. .word..
以上控制文件包括 7 个程序文件:
〔1〕NEST.rob
初始化机器人
〔2〕CONVpar1.rob
从 Conveyor 取零件 1
〔3〕CONVpar2.rob
从 Conveyor 取零件 2〔没有使用〕
〔4〕LATHPARK.rob
从机床上收回机器人手臂
〔5〕LATHGRIP.rob
车床工作完毕伸入车床抓取零件
〔6〕PAR1CONV.rob
从车床取出零件 1 并放回 Conveyor
〔7〕PAR2CONV.rob
从车床取出零件 2 并放回 Conveyor〔没有使用〕
车单元配套机器人的程序只需编制 LATHPARK.rob 和 LATHGRIP.rob;CONVpar2.rob 或
PAR2CONV.rob 程序。
同理,铣单元配套机器人的程序与车单元配套机器人程序类似,只需编制 millpark.rob
和 millgrip.rob;CONVpar2.rob 或 PAR2CONV.rob 程序。
四.实验结果要求
1. 机器人行走路径节点的选择保证无干预。取料送料位置正确。
2. 程序编写正确,运行正常。
3. 程序控制机器人完成动作符合实验要求,运行顺利。
五.实验总结要求
1.实验报告中要对每个文件的每一行注明指令含义。
2.实验中遇到的问题,以及相应解决问题的方法。
3. 实验结果总结。
4. 实验体会。
六.附录〔实验机器人的根本说明、操作和编程指令参考说明〕
〔一〕基 本 说 明
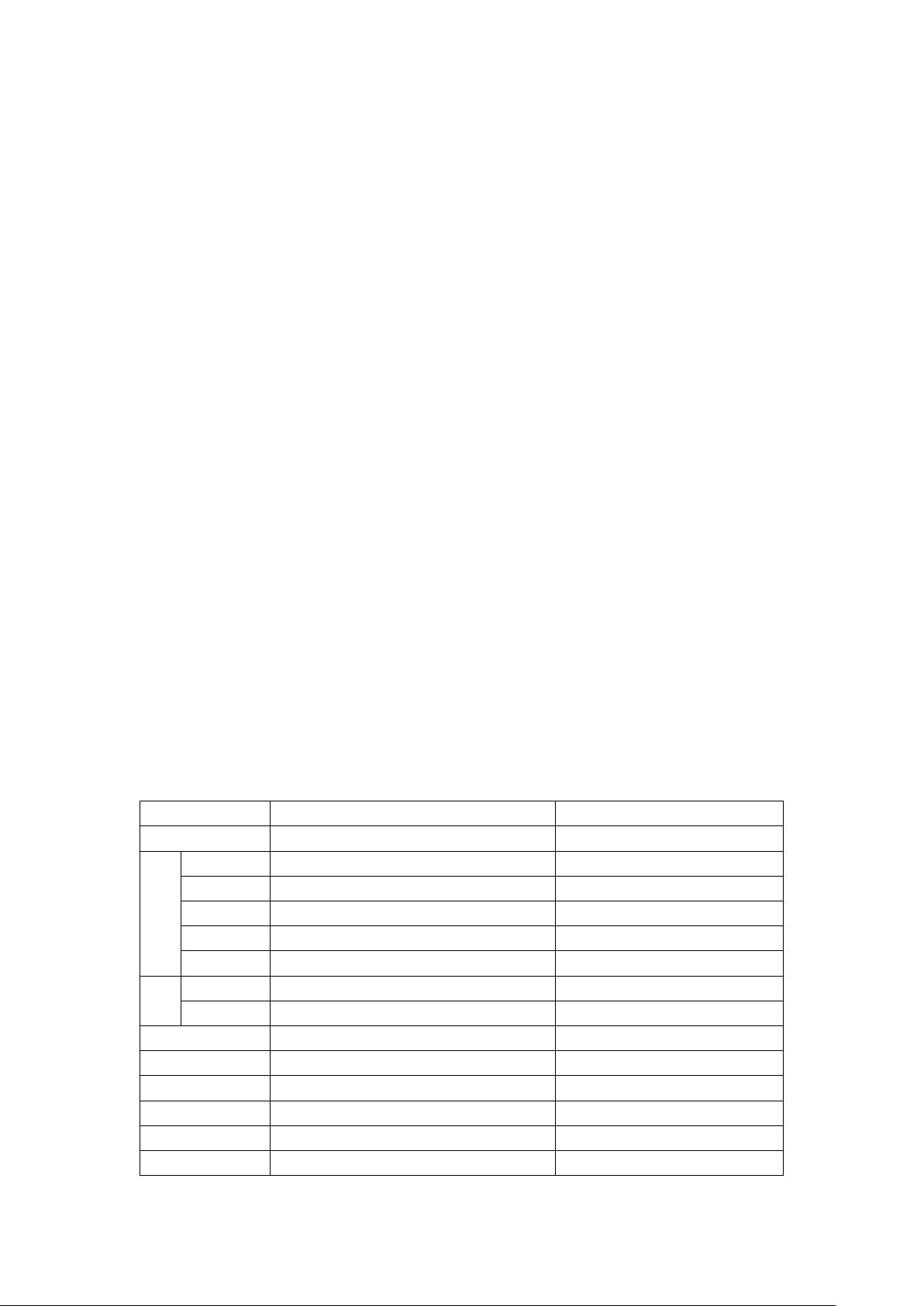
1.标准规格
工程
规格
注释
机械构造
5 自由度,垂直关节机器人
腰部旋转
300 度 〔最大速度 120 度/秒〕
J1 轴
肩部旋转
130 度 〔最大速度 72 度/秒〕
J2 轴
肘部旋转
110 度 〔最大速度 109 度/秒〕
J3 轴
腕部倾斜
�
90 度 〔最大速度 100 度/秒〕
J4 轴
操
作
围
腕部旋转
�
180 度 〔最大速度 163 度/秒〕
J5 轴
上臂
250 毫米
臂
长
前臂
160 毫米
重量驱动
最大 1.2kgf〔包括手部重量〕
距机械外表 75 毫米〔重心〕
最大轨道速度
1000 毫米/秒〔腕部设备外表〕
图 1.3.4 中 P 点的速度
复位
0.3 毫米〔腕部设备外表旋转中心〕
图 1.3.4 中 P 点的准确度
动力系统
直流伺服电机
机器人重量
大约 19kgf
电机功率
J1 至 J3 轴:30W,J4 和 J5 轴:11W
剩余14页未读,继续阅读
2020-12-18 上传
2021-07-08 上传
2023-06-10 上传
2023-08-02 上传
2023-09-13 上传
2023-07-14 上传
2023-03-27 上传
2023-06-08 上传
2023-04-25 上传

matlab大师
- 粉丝: 2720
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
