点阵晶格型自重构机器人模块设计与运动分析
需积分: 5 8 浏览量
更新于2024-08-12
收藏 348KB PDF 举报
"自重构机器人的基本模块结构设计与分析 (2007年) - 费燕琼, 夏振兴, 夏平 - 上海交通大学 - 论文 - TP24 - 文章编号:1004--132X(2007)09--1085一04"
自重构机器人是一种先进的机器人系统,其特点是能够根据任务需求自我组装或重新配置其形态。这篇2007年的论文由费燕琼、夏振兴和夏平共同撰写,探讨了这种机器人的一种新颖的基本模块设计。这个模块采用了点阵晶格型结构,由一个中心体和六个旋转面构成。这种设计旨在实现机器人的高效自重构能力。
中心体是模块的核心部分,内部包含了六个相互正交的锥形齿轮,这种机械传动结构允许一个电机驱动所有六个旋转面。这种设计大大简化了动力传递,减少了所需的驱动部件数量。每个旋转面上对称地布置了一根轴和一个孔,当旋转面旋转并向前移动时,相邻模块上的轴可以插入相应的孔中,完成模块之间的对接任务。这种对接机制是自重构机器人能够实现各种形态变化的关键。
论文中还深入分析了这些空间模块之间的可能运动模式,这是理解自重构机器人运动学和动力学的基础。通过建立一个由三个模块和一个底座组成的简单系统,作者们证明了所设计的模块结构在实际应用中的可行性。这样的系统展示了自重构机器人的基本运动规则,为更复杂的机器人设计提供了理论依据。
自重构机器人的研究对于未来在极端环境下的探索、救援任务以及灵活制造系统等领域具有重要意义。论文中的模块设计考虑了结构紧凑性、可操作性和可扩展性,这些都是设计自重构机器人时必须兼顾的重要因素。通过这种方式,自重构机器人能够适应不断变化的工作场景,提高了任务执行的灵活性和效率。
这篇论文为自重构机器人技术的发展提供了新的视角和创新的设计思路,对于相关领域的研究者和技术开发者具有重要的参考价值。通过深入研究和优化这种基本模块,未来的自重构机器人将有可能实现更复杂、更智能的重构行为,进一步推动机器人技术的进步。
自重构机器人的基本模块结构设计与分析一一费燕琼夏振兴
夏
平
自重构机器人的基本模块结构设计与分析
费燕琼夏振兴夏平
上海交通大学,上海市,
200030
摘要:给出了一种新颖的点阵品格型自重构机器人的基本模块,该模块由
1
个中心体及
6
个旋转面组
成。中心体内由相互正交的
6
个锥形齿轮组成机械传动结构,完成
1
个电机驱动
6
个旋转面转动的功能,
旋转面上对称布直一轴和一孔,由旋转面的旋转、前进,完成相邻两模块相应旋转面上的轴插入相应孔中
的对接任务。分析了空间模块间的可能运动,并用由
3
个模块和
1
个底座组成的自重构机器人系统来说
明所设计模块结构的可行性。
关键词:自重构机器人;模块;结构;运动规则
中图分类号:
TP24
文章编号
:1004--132X(2007)09--1085
一
04
Structural
Des
ign and
An
alysis
of
a Module
in
Self
一
reconfigurable
Robots
Fei Yanqiong Xia Zhenxing Xia Ping
Shanghai ]iaotong University
, Shanghai, 200030
Abstract: A novel module of a
lattices-
based
self-
reconfigurable robots was presented. Each module
consisted of a cube and six rotary sides.
There
were six
cone-
shaped gears to finish
the
inner transmission.
A
motor
worked and six sides
to
be rotated.
There
was one peg and one hole in each rotary side to finish
two
neighboring modules docking action.
The
possible
3
一
D
motions among modules of the
self-
reconfigurable
robots were analyzed.
At
last, a
self-
reco
日
figurable
robot system consisting of three modules and one base
was presented to verify
the
structural design of the module.
Key words:
self-
reconfigurable
robot;
module;
structure;
motion rule
O
引言
自重构模块化机器人由许多相似的自治机械
电子模块组成,它是靠自身的变形来改变功能的,
具有一般固定形状机器人不可比拟的优越性,在制
造上更加易于批量化,成本低。由于具有自主变形
能力,该类变形机器人的功能远远超过常规的固定
形状的机器人,可用在非结构环境中的搜寻营救、
空间探险、海洋勘探、军事等领域的检查及修理。
国外对自重构机器人已开展了大量研究,研制
了多种不同样机,主要有点阵晶格型自重构机器
人、链式自重构机器人、伸缩式自重构机器人。点
阵晶格型自重构机器人中的模块的作用是填充平
面或空间,再由模块填充所形成的机构去实现某种
操作任务。这类机器人的模块像晶体中的原子,是
同构的,优点是比较容易实现自重构,主要有
3-D
SRS
、
I
一
Cube[lJ
、
Proteo[2J
等。链式自重构机器
人民
.4J
的特点是通过模块群形成整体自由度,能在
大范围内整体运动,实现构型变化,在整体上呈非
实体性的线形状,整体所能到达的空间范围较大。
伸缩式自重构机器人口,
6J
的特点是通过模块内的伸
缩自由度来实现模块的连接和断开,形成整体构型
变化。国内在这方面的研究刚刚起步。笔者在国
外研究成果的基础上,开发设计了点阵晶格型自重
收稿日期
:2006-03-07
基金项目:国家自然科学基金资助项目(
5030502
1)
构机器人的基本模块。
1
基本模块的结构设计
每个模块必须具有以下特点:①设计自主性,
即模块中每个变量的设计是局部化的;②通信自主
性,即两相邻模块之间的通信,由局部动作来实现
全局的行为;③动作自主性,即每个模块有能力在
没有外界干预的情况下执行其自身的功能;④结构
自主性,即每个模块是可扩展的开放式结构,以便
模块的进一步完善。
1.
1
外形结构
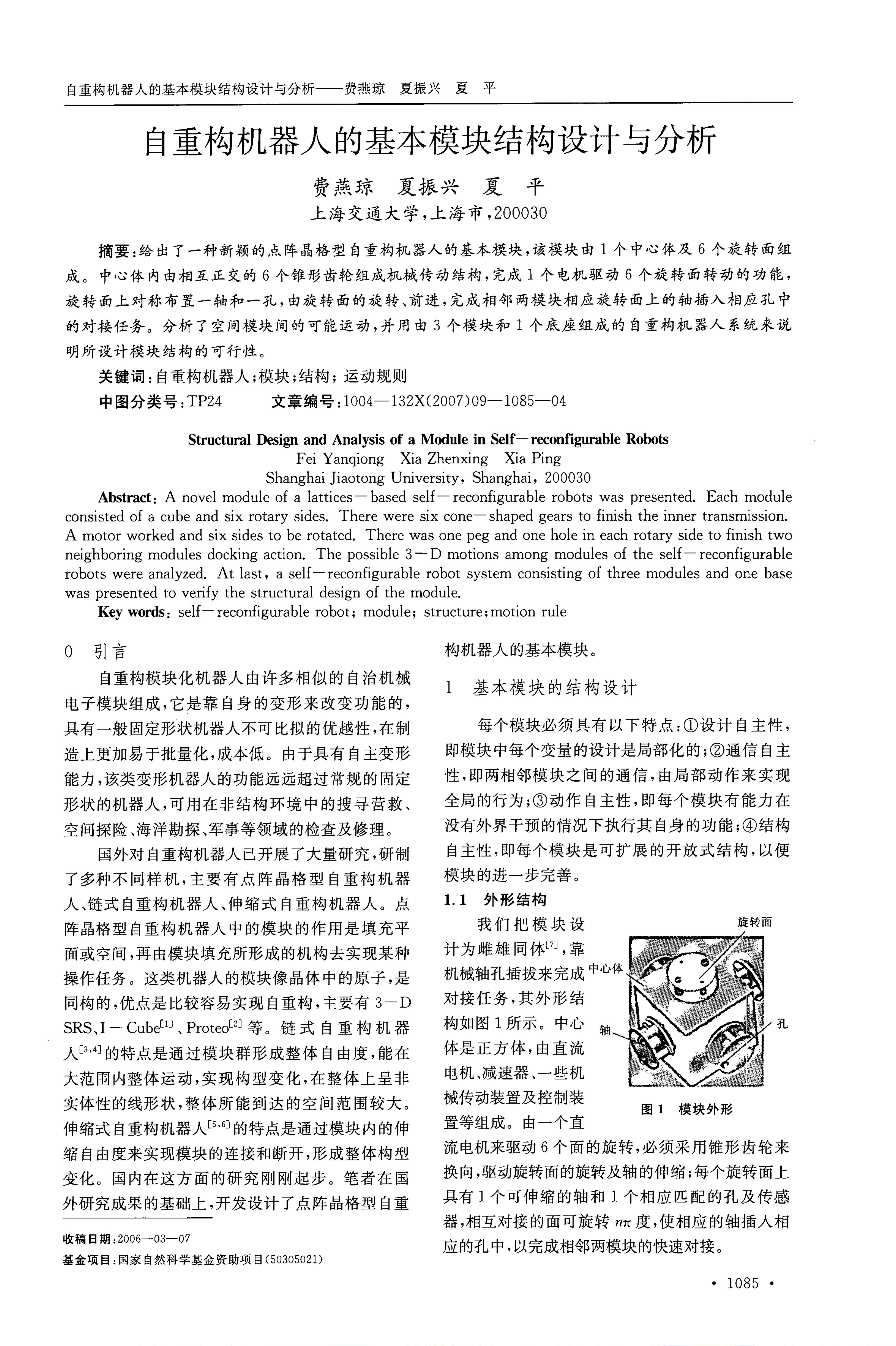
我们把模块设
计为雌雄同体
[7]
,靠
机械轴孔插拔来完成中心体
I
对接任务,其外形结
构如图
1
所示。中心轴
体是正方体,由直流
电机、减速器、一些机
械传动装置及控制装
置等组成。由一个直
旋转面
孔
图
1
模块外形
流电机来驱动
6
个面的旋转,必须采用锥形齿轮来
换向,驱动旋转面的旋转及轴的伸缩;每个旋转面上
具有
1
个可伸缩的轴和
1
个相应匹配的孔及传感
器,相互对接的面可旋转
m
度,使相应的轴插入相
应的孔中,以完成相邻两模块的快速对接。
• 1085 •
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-09 上传
2021-04-22 上传
2021-05-17 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38665775
- 粉丝: 3
- 资源: 946
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
