六轴机器人运动学与轨迹规划仿真研究
版权申诉
12 浏览量
更新于2024-06-23
收藏 921KB DOC 举报
“机器人运动学的研究涉及机器人结构、运动学正逆问题、轨迹规划以及基于OpenGL的图形建模和仿真软件的开发。”
本文深入探讨了机器人运动学,首先在第一章介绍了研究背景,阐述了工业机器人作为自动化生产设备的重要角色,特别是在多品种、变批量生产中的优势,它们能够提升产品质量、生产效率,并优化工作环境。
第二章集中讨论了机器人运动学。机器人的结构被详细分析,以六轴机器人为例,这种类型的机器人广泛应用于各种工业场景。运动学正问题涉及将机器人的关节变量转换为末端执行器的位置和姿态,而运动学逆问题则是找出使末端执行器到达特定位置和方向所需的关节角度。这两个问题是机器人运动控制的基础。
第三章介绍了机器人运动轨迹规划,这是确保机器人高效、安全运作的关键。文中概述了轨迹规划的基本概念,定义了机器人的工作空间,并详细讲解了关节空间轨迹规划的实现方法,包括直线插补算法,这是一种常见的路径规划策略,能确保机器人在运动过程中的平滑性。
第四章涉及基于OpenGL的图形建模。OpenGL作为一个强大的图形库,用于创建和渲染复杂的3D图形。文中说明了OpenGL的基本功能和工作流程,并探讨了如何结合MFC(Microsoft Foundation Classes)框架来开发OpenGL应用程序,这对于可视化机器人运动至关重要。
第五章重点讲述了仿真软件的编制。这部分详细描述了软件开发的过程,包括用户界面设计,以及软件实现的各项功能,如机器人运动的模拟、轨迹显示和控制系统等。
最后的小结部分回顾了论文的主要贡献,即对六轴机器人运动学的深入研究,正反解运算的分析,轨迹规划和直线插补算法的应用,以及利用OpenGL和MFC开发的仿真软件及其操作步骤。关键词突出了六轴机器人、OpenGL技术和机器人仿真是本文的核心内容。
该文档提供了关于机器人技术全面且深入的理解,涵盖了从理论到实践的多个层面,对于机器人设计、控制和仿真软件开发具有重要的参考价值。
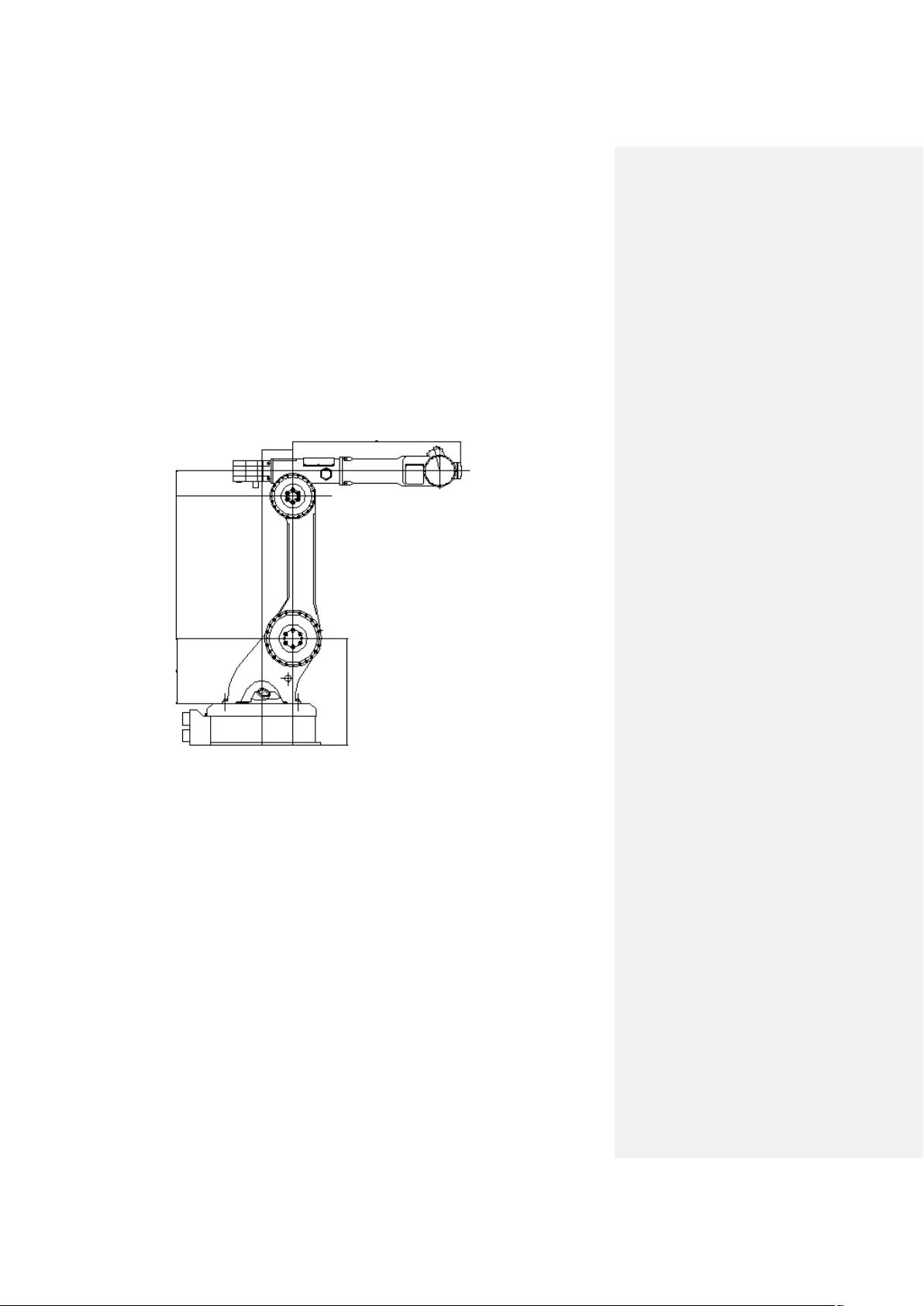
节机器人来说,手臂部件是定位机构,而手腕部件则是定向机构。
本文所研究的实现操作功能的机器人(如图 2)是由一系列用关节联在一起
的构件所组成的具有 6 个自由度的开链型空间连杆机构。始端连杆即为机械手的
机座或称为基杆,末端连杆则与机器人的手爪相连,相邻连杆之间则用一个旋转
关节连接在一起。
图2
2.2 运动学正问题
2.2.1 转动连杆坐标系的建立及连杆的 Denavit-Hartenberg(D-H)参数
连杆 i 坐标系设置在关节 i+1 上;
i
Z
轴沿关节 i+1 运动轴线方向;
i
X
轴既垂
直于
i
Z
轴,
又垂直于
1i
Z
-
轴,其正方向由关节 i 指向关节 i+1;
i
Y
轴由右手定则确定,使
{
i
X
i
Y
i
Z
}构成右手直角坐标系。
剩余36页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-05-11 上传
2021-10-07 上传
2022-12-09 上传
2023-07-12 上传
2022-05-11 上传
2023-07-11 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Wrox.Professional.VSTO.2005.Visual.Studio.2005.Tools.for.Office.May.2006.pdf
- Ajax简单实例.doc,看题目
- C_的高校图书资料管理系统的设计.pdf
- 应用单片机设计数字电容表
- 常用js判断上一页的来源.txt
- adfasdfasdfasdfa
- ActionScript 3.0 Cookbook 中文版.pdf
- Qtopia 编译过程
- matlab辅导材料
- 用推送技术动态更新页面内容.doc
- SAP高级编程指南--abap351
- 我国机械行业核心竞争力
- C程序设计语言_第2版新版
- logistic映射分岔图的四种实现方法
- 模拟FAT文件系统的设计与实现
- Java2阶段测试,适合初学者做
